
资料下载


TinyML空中森林火灾探测
overheat
分享资料个
描述
问题
森林火灾在全世界都是一个严重且致命的问题,尤其是在我们的家乡加利福尼亚州。2021 年,仅加利福尼亚州就有 7,480 场野火烧毁了 2,281,050 英亩的土地,随着气候变化,这个问题只会变得更糟。野火威胁着我们的家园和野生动物,一旦它们蔓延,在不严重危及我们的消防员的情况下几乎不可能停止。防止野火变得如此严重的一种方法是早期检测系统。
具体来说,我们决定制造一架高效的遥控飞机,它能够在使用机载摄像头、TinyML 和卫星调制解调器检测和报告野火的同时自主飞行。
TinyML 空中探测
早期森林火灾探测只有两种可能的方法:放置在固定位置周围的传感器或测量土地的航空设备。后者是更好的方法,因为它更可靠、更实惠、覆盖范围更广,并且可以部署在任何地方。此外,将传感器放置在野生动物身上可能会对生态系统造成破坏。
空中设备受到重量和功率的限制,因此使用红外热像仪来探测火灾并不理想——像样的热像仪重量很重,耗电量太大。TinyML 解决了这些限制,因为可以在机上处理常规图像,从而允许小型、轻便、高效的硬件。
使用的数据集是火焰数据集,它由有火和无火的景观航拍照片组成。还包括其他数据集,例如火灾数据集和森林火灾。在训练 CNN 100 个时期后,我们实现了大约 96% 的验证准确率,并且通过量化,该模型能够适合 Arduino Nano 33 BLE 的内存。要了解更多关于我们如何训练模型的信息,请查看 Jupyter Notebook。
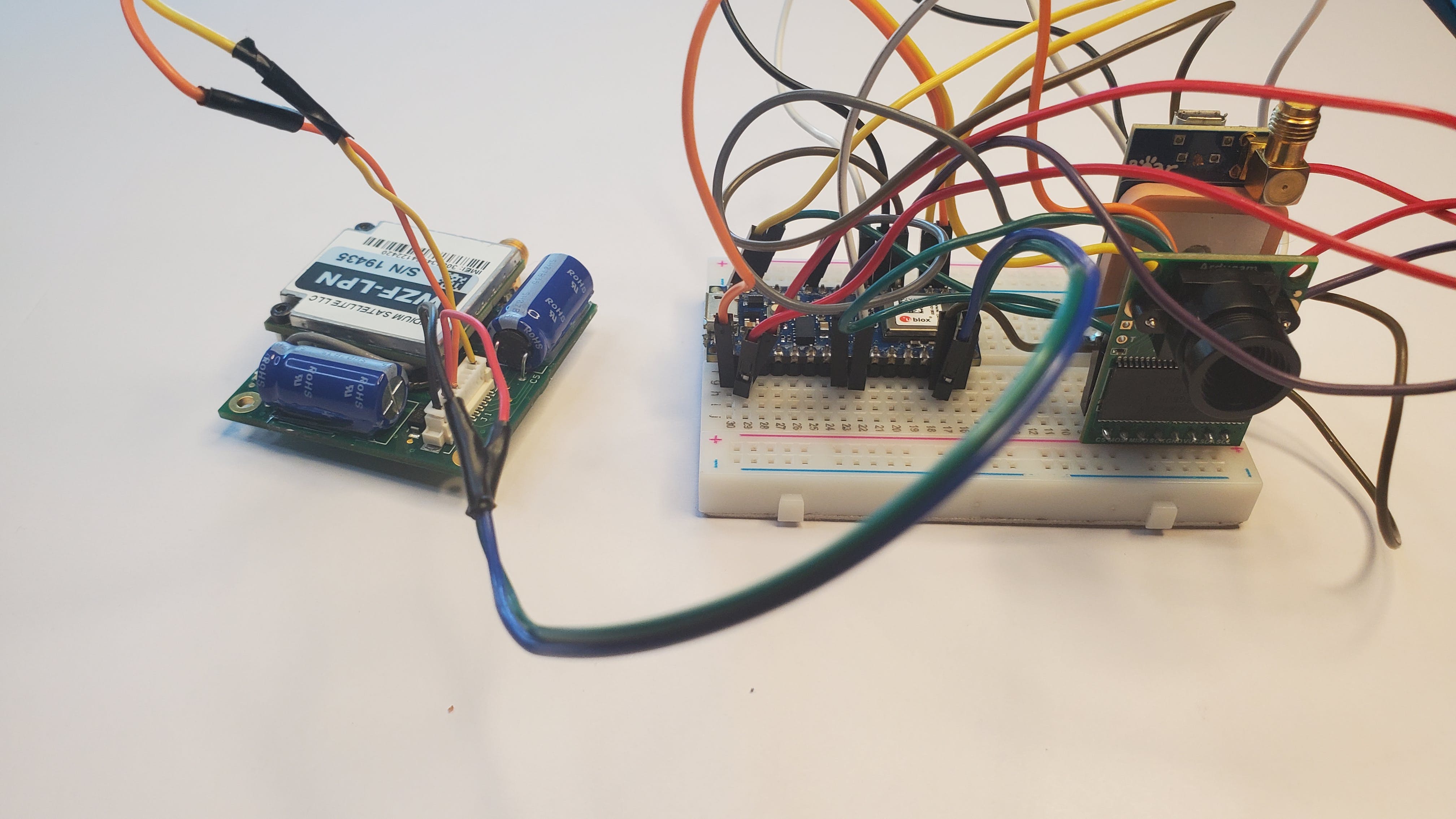
卫星
能量消耗
为节省电量,Arducam OV2640、Arduino Nano 33 BLE 和卫星模块在拍摄每张照片后休眠 500 毫秒。完整的设备(包括 GPS,耗电 150 毫安)对飞机的电池寿命影响很小(≈ 总耗电量的 0.3%)。这架飞机可以以 30 英里/小时的速度(飞行约 45 英里)在空中持续至少 90 分钟,并且如果电池更多(有空间),飞机可以飞行更长的时间。此外,当在高空飞行时,飞机一次飞行可以覆盖相当大的陆地。
______________________________________________________________
建造飞机
我们决定使用飞机,因为飞机会产生自己的升力,使它们比多旋翼飞行器更节能。它们还可以覆盖更远的距离,这在寻找广阔森林中的火灾时非常有用。
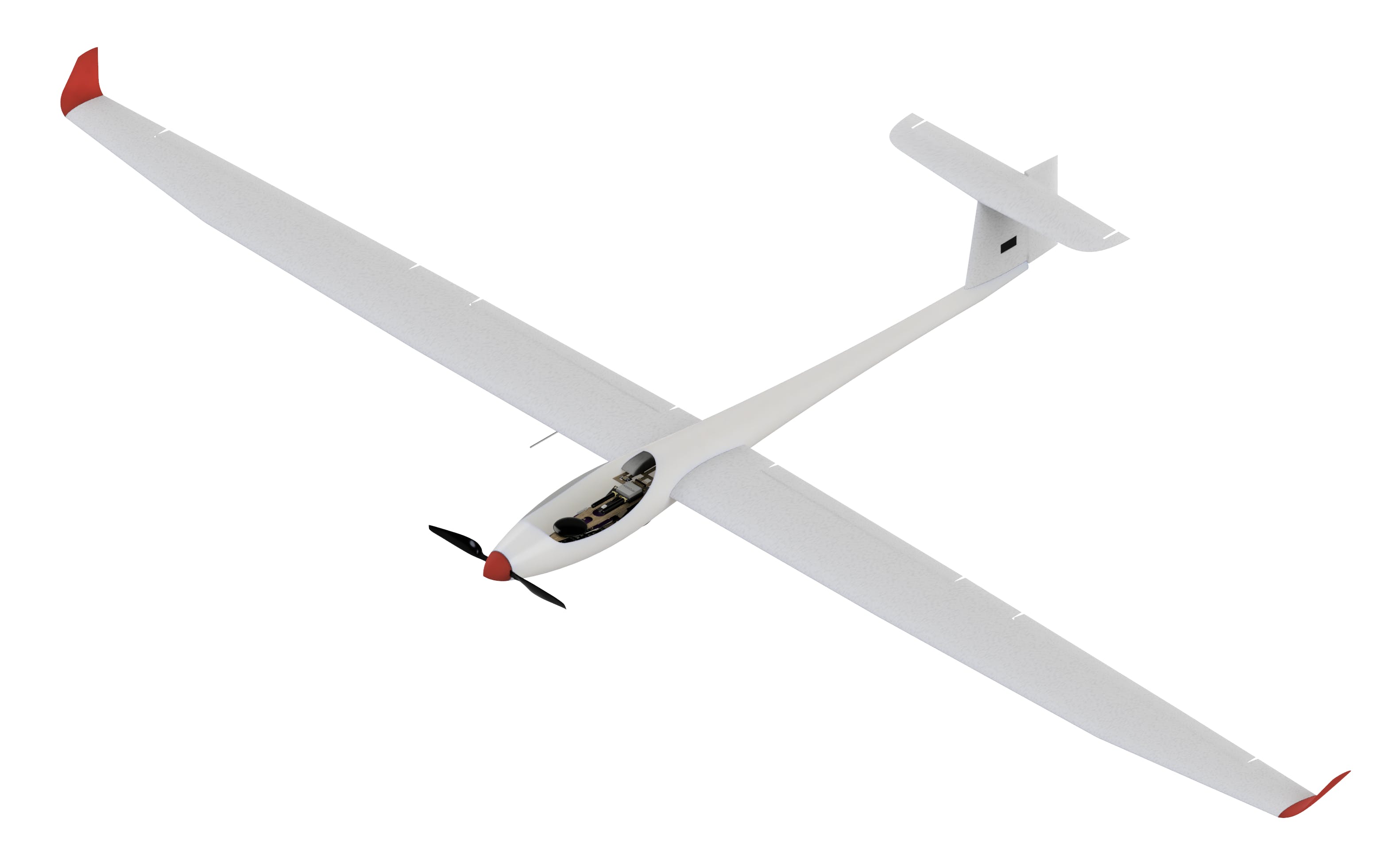
1. 使用随附的说明获取并组装飞机。
我们使用了 ASW28 V2 电动滑翔机,这是一种以高效着称的流行滑翔机。
2. 获得以下物品(如下图所示)。
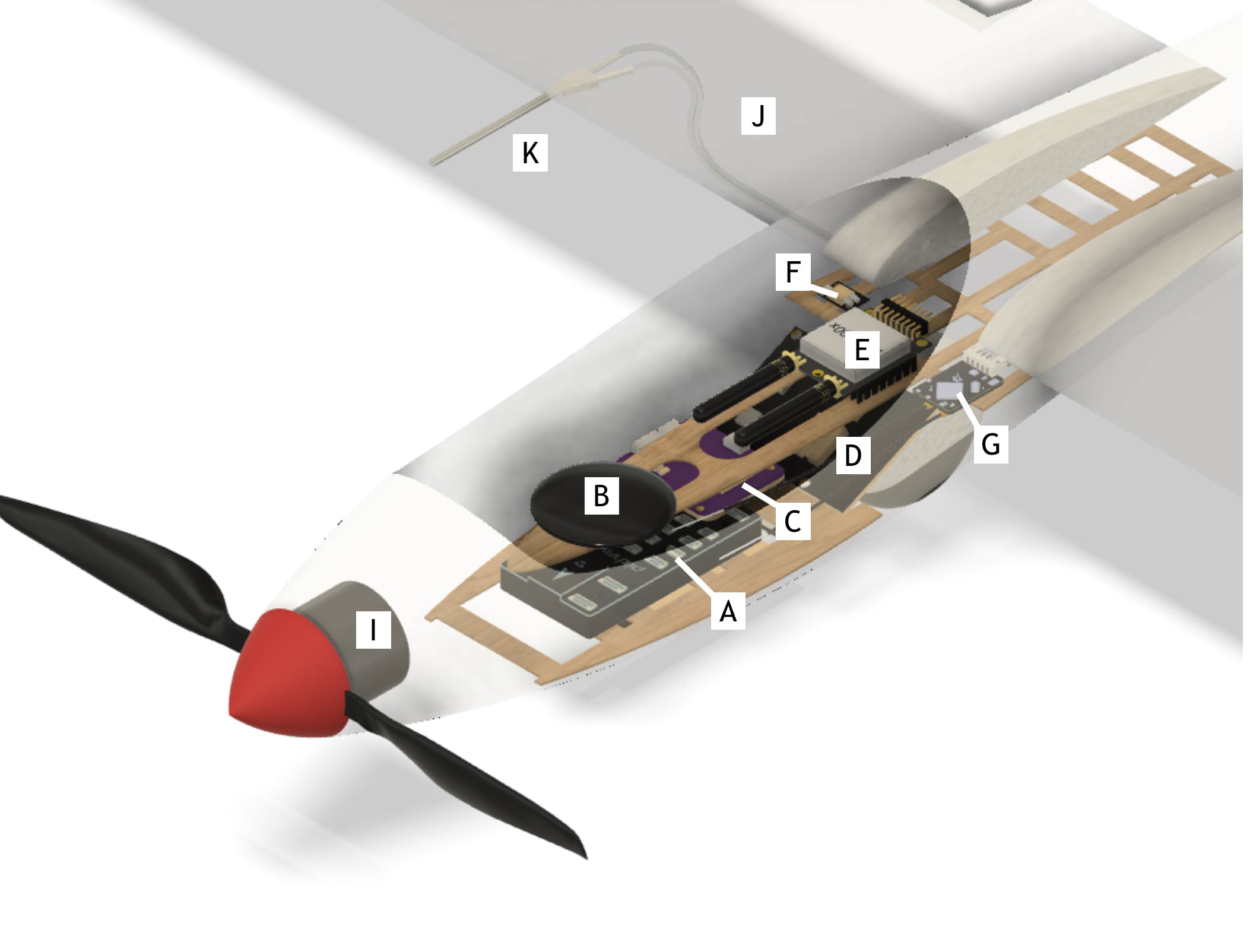
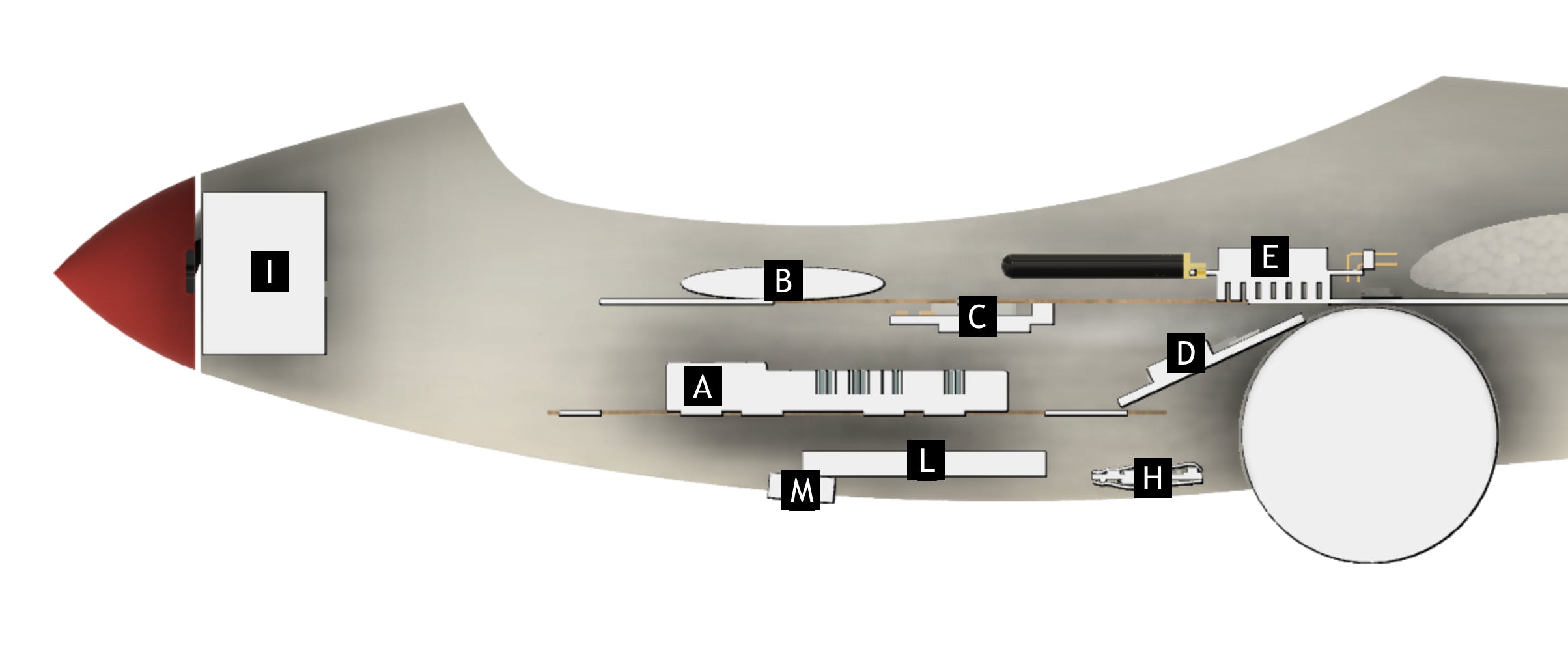
答:Pixhawk 4
B:这里 GNSS GPS/罗盘
C:辅助 GPS/指南针
D: Pixhawk 电源管理板
E:RFD900x 遥测调制解调器
F:空速传感器
G:TBS Crossfire Diversity Nano RX
H:电调
一:电机
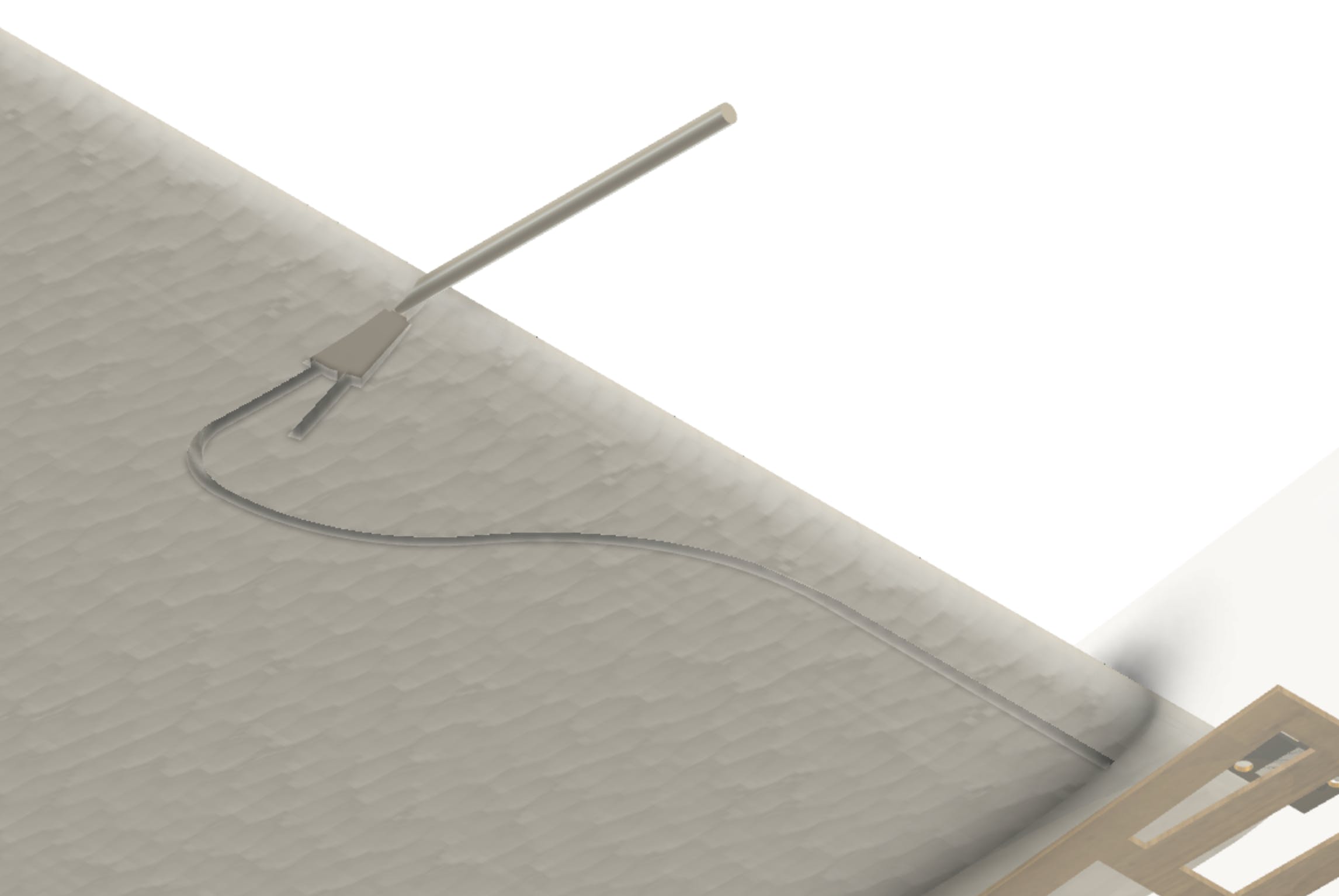
J:空速管
K:皮托管
L:面包板
男:相机
*注意:大多数现成的飞机套件中都包含电机和 ESC。
3. 为空速管和空速管在泡沫上切槽,将空速管穿入机身。
4. 获得一块轻质轻木板来固定所需的航空电子设备。此板如图1所示,配套B和E。
5. 在飞机底部开一个洞,让相机可以看到地面。

6. 使用双面胶带,将图 1 和图 2 中所示的所有航空电子设备连接到各自的位置。

7. 根据随附的示意图(见页面底部)连接航空电子设备。
______________________________________________________________
飞行
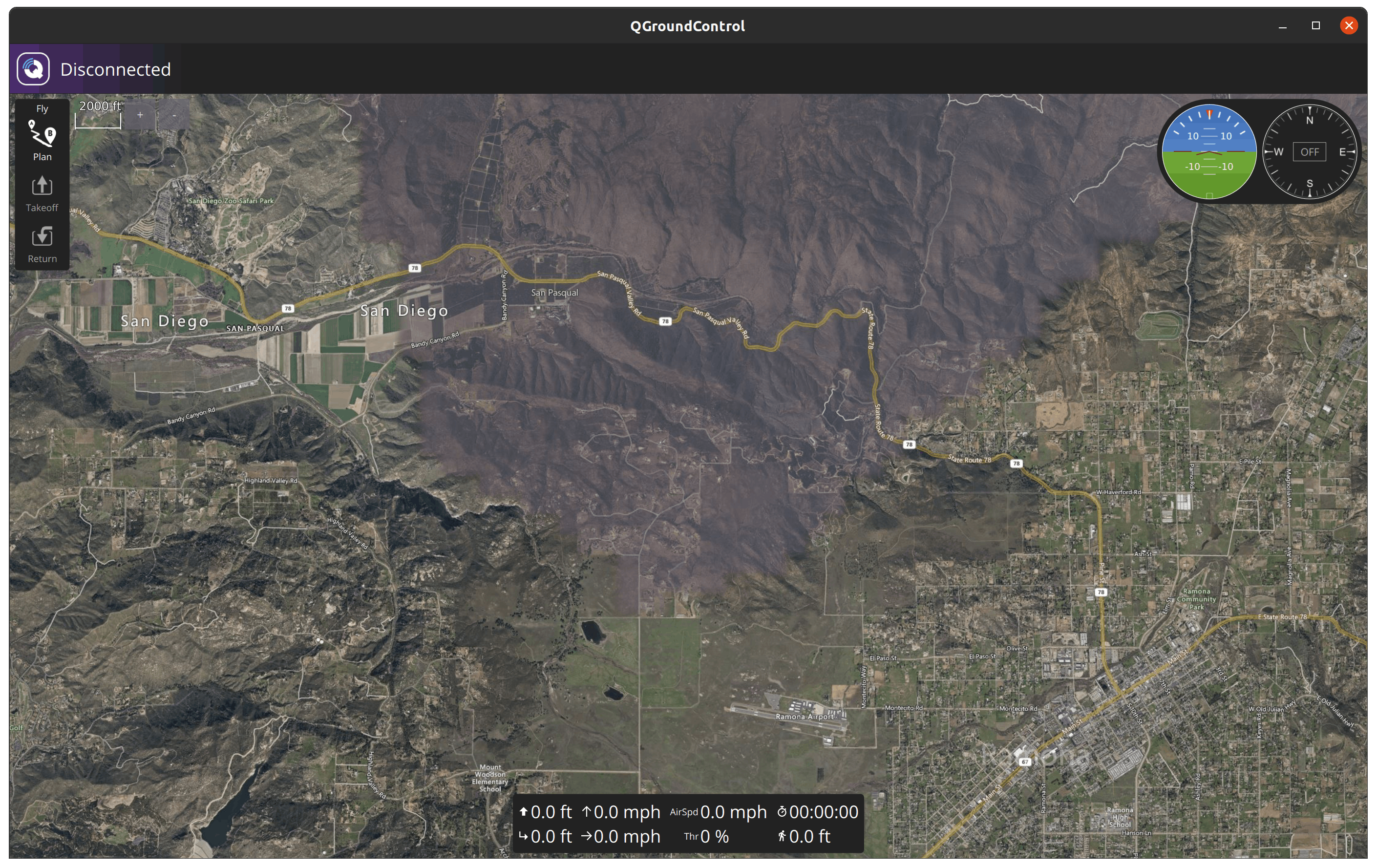
对于我们的地面站软件,我们选择了 QGroundControl,因为它可以与 PX4(在 Pixhawk 飞行控制器上运行的固件)配合使用。这是我们的一项任务的示例。这是一张交互式地图,显示了我们的飞机所走的路线,以及来自飞行的大量传感器数据。除了安全至上的发射之外,这架飞机在所有时间都保持完全自主。这种自主飞行包括飞机前往多个预定航路点,标志着未来不仅在自主飞行,而且在公共安全,特别是森林火灾安全方面迈出了重要一步。
未来的改进
一种模块化且高效的森林火灾检测方法对于现代世界的安全和安保至关重要。我们当前设计的一项改进是将太阳能电池板连接到飞机的机翼上,使飞机不仅可以自主飞行,还可以在夜间飞行,因此可以无限期飞行。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





