
资料下载


MiniZed和Mighty机器人
王强
分享资料个
描述
在最近的Mini but Mighty build-along 展示了带有板载 Zynq 处理器的 Avnet MiniZed 如何控制电机之后,我开始想知道我们能做到多“强大”。
我们跟进的项目将 Zynq 的 3.3V 低功耗 IO 升级为能够以高达 2A 的电流驱动 12V 电机。相当令人印象深刻,但让我们再大一点!
五金件
我最近很幸运能够玩(抱歉,努力控制)一个相当大的工业机器人手臂。这不是一个小爱好伺服驱动机器人。它是一个完整的 6 轴机器人手臂,伸展范围约为一米,能够以惊人的速度摆动 5 公斤的有效载荷!我们认为小型 MiniZed 能够胜任控制它的工作吗?好吧,让我们找出答案!
嗯,首先你需要一个机械臂。我使用的是 Universal Robots UR5e,但任何具有标准 24V 输入的机器人都可以。
我们如何控制它?
在微控制器/FPGA 世界中,我们习惯于使用 3.3V 的小信号,而工业世界则喜欢在 24V 下工作。有一个 IEC 61131-2 标准,所以我们在这里做的事情应该适用于很多大型设备。不幸的是,我们用于构建的 H 桥只能在高达 12V 的电压下工作,因此我们必须自己创建一些东西。不过别担心,这不会很困难。
构建我们的自定义 PMOD
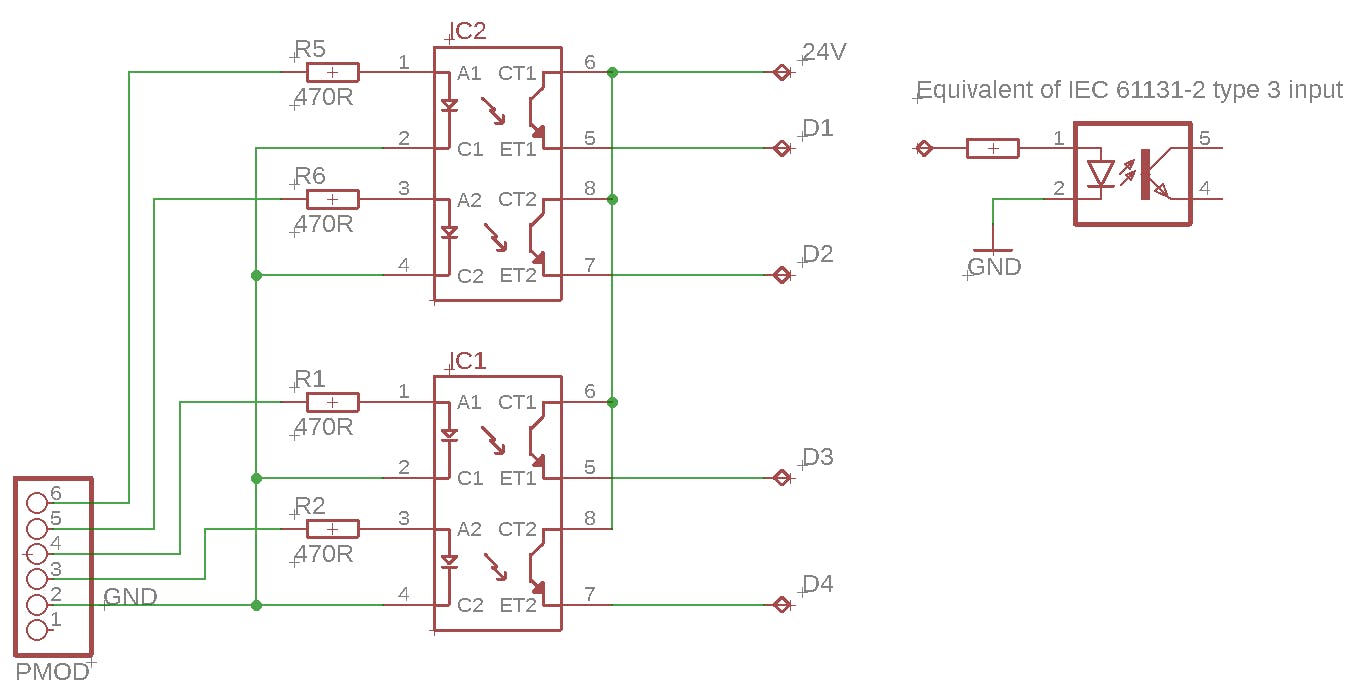
我们的 MiniZed 有 3.3V 输出。我们的机器人使用 24V 电源。我们需要一些东西来翻译信号。幸运的是,这并不像听起来那么困难。由于它是相当现代的机器人,它具有 IEC 61131-2 标准的 3 类输入,这意味着它在 24V 时仅吸收几毫安的电流。我们仅以一种方式从 MiniZed 向机器人发送信号,因此我们的定制 PMOD 仅需要一个电阻器(适合与 LED 一起使用)和每个通道的光隔离器。这是我们的电路图。右侧是我们可能在机器人中找到的近似值。您会明白为什么我们只需要一个晶体管来驱动它。
将这个电路焊接到一块条板上真的不需要很长时间。唯一可能有所改进的是大约 90 度的接头销,因此它与 MiniZed 平齐。有时最好只使用手头的东西。
修改 Mini but Mighty 代码
Adam Taylor 最初的 Mini but Mighty 示例使用了一个 GPIO 和一个 PWM 输出。这里我们使用 4 个 GPIO。我们需要在 Vivado(用于硬件设计)和 Vitis(用于软件)中进行一些小的修改。
为了使本指南简洁明了,我不会重复原文中的所有内容。一旦您完成了这项工作,我将只解释差异。
Vivado 的变化
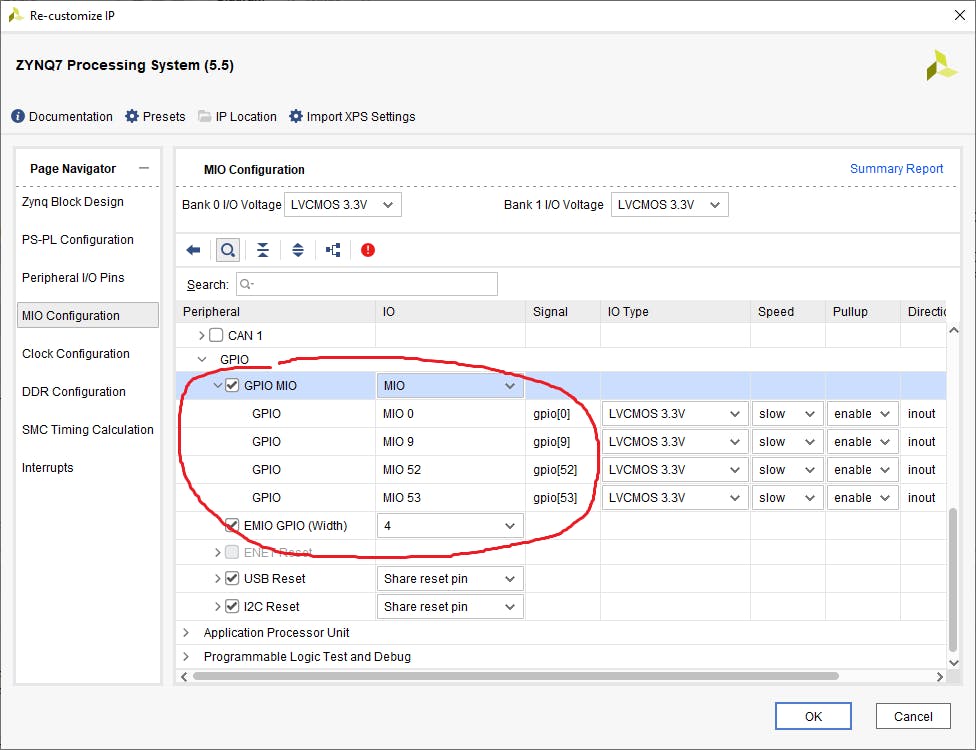
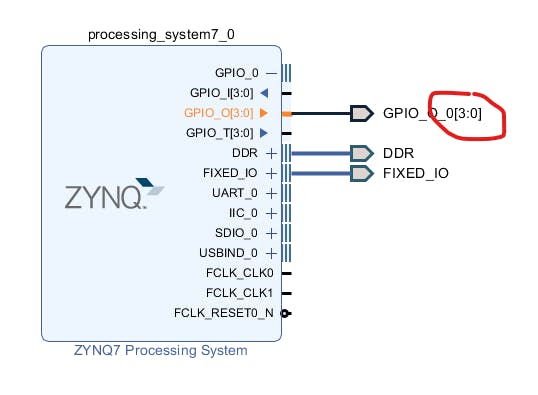
Vivado 中没有太多变化。在原始项目使用一个 GPIO 的地方,我们只需要选择 4 个。我们不再需要 TTC(三重定时器计数器),但保留它也没有坏处。不要忘记像您一样将这些新的 GPIO 设置为外部与单一的。我已经敲响了以下所需的更改:
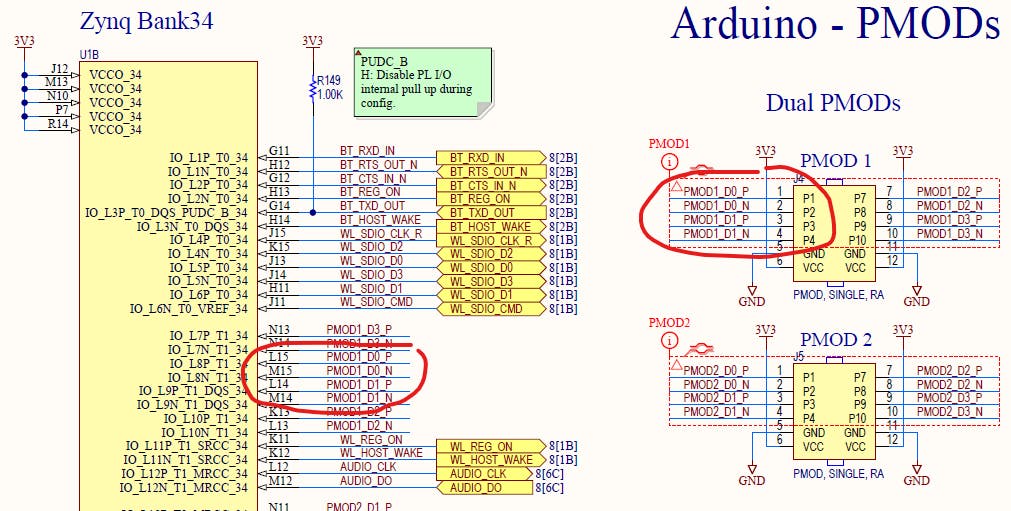
为了将这些连接到外部世界,我们需要将它们映射到 PMOD 1 上的前 4 个引脚。我将不只是告诉您使用哪些引脚,而是解释如何找到它们。这是为了防止您想做一些稍微不同的事情。您需要 MiniZed 的原理图,网址为http://zedboard.org/support/documentation/18891
在这里您可以看到它们是 L15(与原来的一样)、M15、L14 和 M14。
这导致我们更新我们的约束文件以启用这些。完成这些更改后,只需导出硬件并按照原始指南启动 Vitis。
# MiniZed PMOD 1 pins 1-4 as GPIO output
set_property PACKAGE_PIN L15 [get_ports GPIO_O_0[0]]
set_property PACKAGE_PIN M15 [get_ports GPIO_O_0[1]]
set_property PACKAGE_PIN L14 [get_ports GPIO_O_0[2]]
set_property PACKAGE_PIN M14 [get_ports GPIO_O_0[3]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[0]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[1]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[2]]
set_property IOSTANDARD LVCMOS33 [get_ports GPIO_O_0[3]]
葡萄的变化
我们需要在 Vitis 中进行的更改是使用所有四个 GPIO。我们还可以放弃用于处理 PWM 的定时器相关代码。在更改之前,我特意在源代码管理下检查了原始代码,因此您可以准确地看到添加和删除的内容。
我不确定的一件事是为什么我们在代码中访问第一个 GPIO 引脚作为引脚 54。我猜 0-53 号针脚用于 MIO 针脚,54 号以上用于 EMIO 映射针脚,尽管我还没有找到记录它的地方。不管为什么,3 个额外的 GPIO 是引脚 55-57。
您可以在https://github.com/FredMurphy/MiniZed_MightyRobot找到 Vivado 和 Vitis 的所有源代码
将其连接到机器人
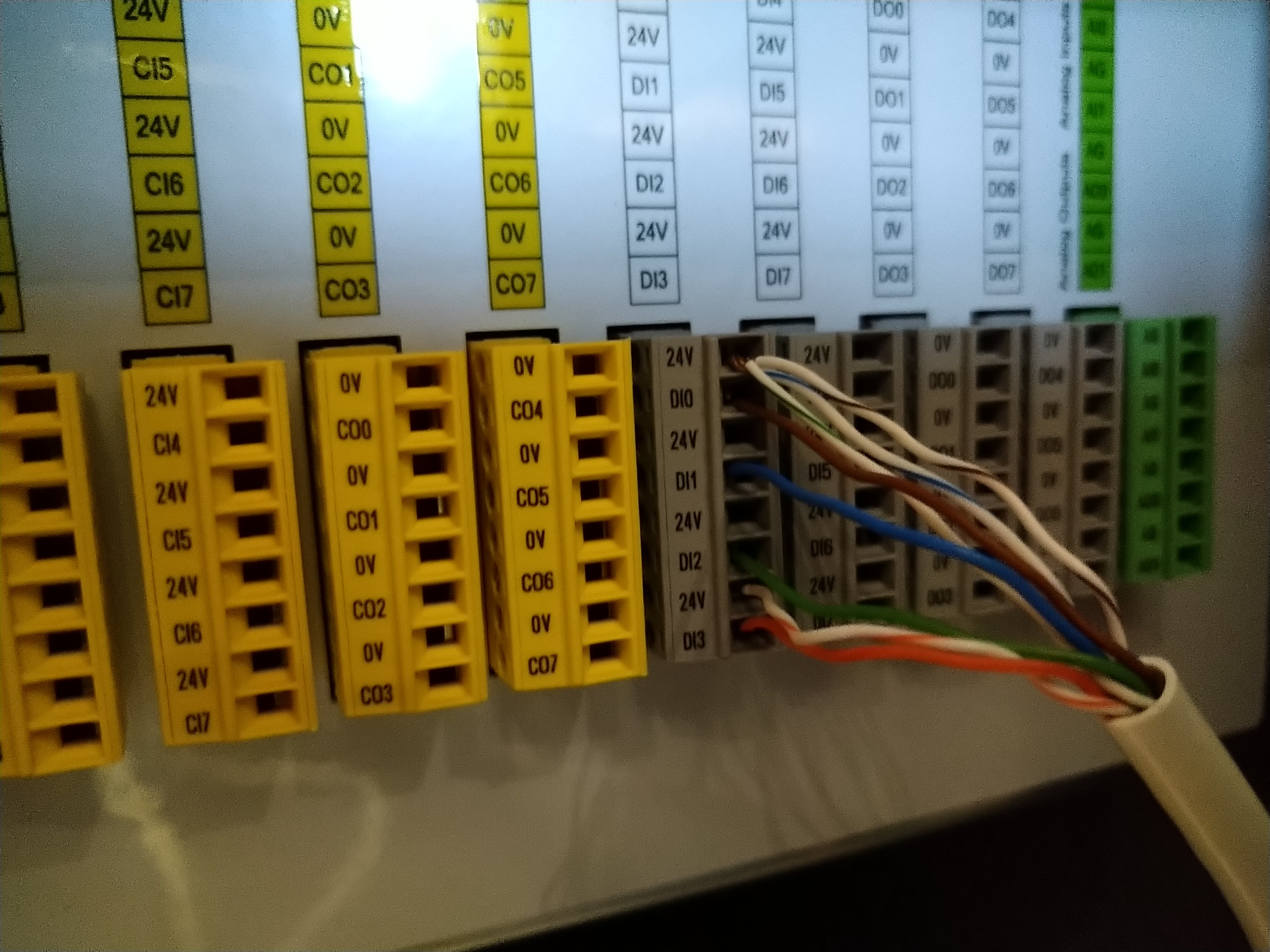
我们需要做的第一件事是检查 GPIO 是否连接到机器人并被视为更改输入。一点 8 芯 CAT5E 以太网电缆被证明是有用的,我将我们的 4 个输出(加上 24V)连接到机器人上的 4 个数字输入。
在这里你可以看到我的第一个 GPIO 被检测为数字输入 1 上的高输入。它只是屏幕上的一个小复选框,但它意味着大事!

机器人编码
与 Zynq 相比,为机器人编程是轻而易举的事。基础知识主要涉及设置几个航路点并告诉它到达那里的速度。如果你想让它做更高级的东西,它还有更多的东西,但它真的没有那么难。这是示教器上显示的我们的机器人程序。您可以在源代码存储库中看到这一切。
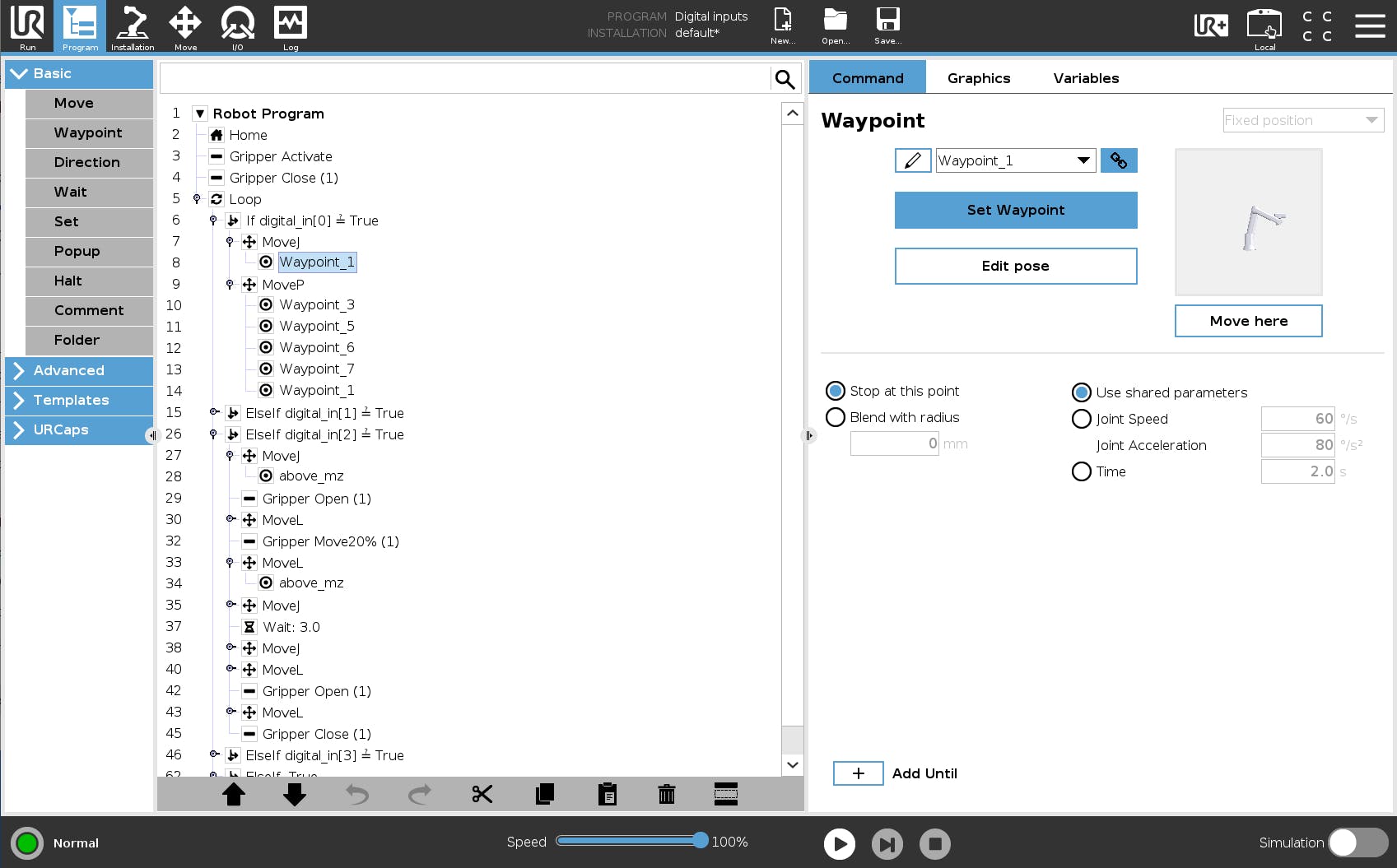
我使用了一个非常简单的程序,它将每个 GPIO 映射到一个序列。显然,可以做得更多。我们的 4 个输入为我们提供了 16 种组合可供使用 - 尽管将它们组合为 4 位并行总线并不是内置的。机器人不直接支持 PWM,但它有一个 0-12V 模拟输入,所以我可以保留原始 PWM 输出,对其进行平滑处理并用它来控制机器人的速度。
如果您想了解有关工业机器人编程的更多信息,可以在此处使用模拟来完成。您必须创建一个帐户,但除此之外都是免费的。
演示
好吧,如果我们没有看到 MiniZed 和机器人在行动,那就没有乐趣了,不是吗?我希望您喜欢看到 MiniZed 可以与一些更大的东西交互,并且您受到启发自己尝试一些大东西!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





