
资料下载


通过网络控制的机器人汽车
陈韵瑄
分享资料个
描述
描述
机器人控制的汽车如今已经兴起,但想象一下,如果汽车连接到互联网,您可以从地球上的任何地方控制汽车。它在出于道德目的了解秘密等领域有许多应用。
为什么选择 Bolt作为平台?
Bolt 模块使处理事物变得容易,因为 Bolt 提供了云设施,它使得开发基于 Internet 的产品仍然很容易,只需付出一点努力。
这是我在Hackster.io上的第一个项目,所以很想知道您对这个项目的反馈和建议。
该项目基于Bolt 物联网平台。在我们继续讨论如何完成这个项目之前,我想告诉你这个项目是做什么的。
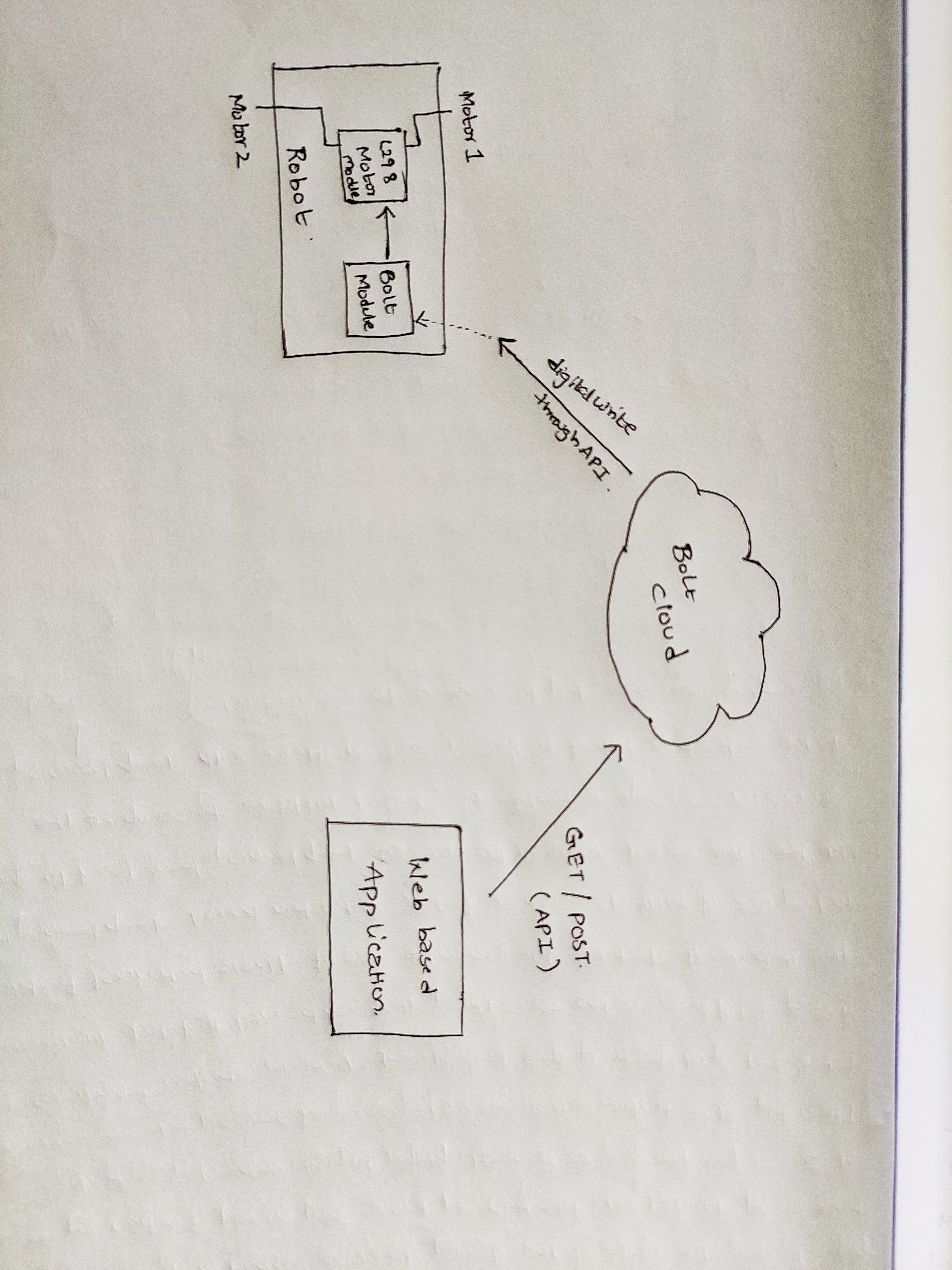
当我们的机器人汽车通过调制解调器或路由器等方式连接到互联网时,我们就可以通过网页(即基于网络的应用程序)控制机器人汽车。
信息流
要遵循的步骤:
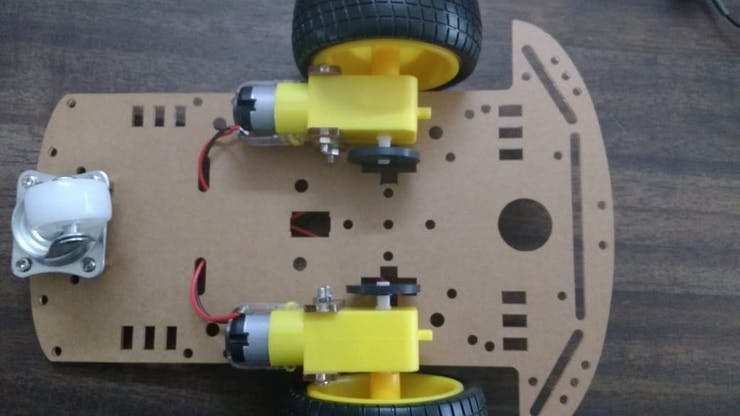
1. 如图所示,将脚轮安装在底盘的前部中间部分。
2. 组装机器人汽车底盘并使用螺母和螺栓连同提供的轮子连接两个直流电机,如图所示。
注意:将电线焊接到电机端子,然后再将其连接到底盘。
3. 现在将电机的端子连接到 L298N 电机驱动器模块,如下所示。
注意:将电机的两个端子连接到驱动器模块的同一侧。
4. 将驱动模块的5V脚和GND脚分别接到Arduino的5V和GND上。
5. 将电源线连接到 Arduino 的 Vin,使其通电,并将同一电源线连接到 Bolt 模块的 5V 引脚。
6. 将母对公跳线从驱动模块的 IN1、IN2、IN3、IN4 连接到 Bolt 模块的 1、2、3、4 针脚。
现在让我们实现代码的软件版本:
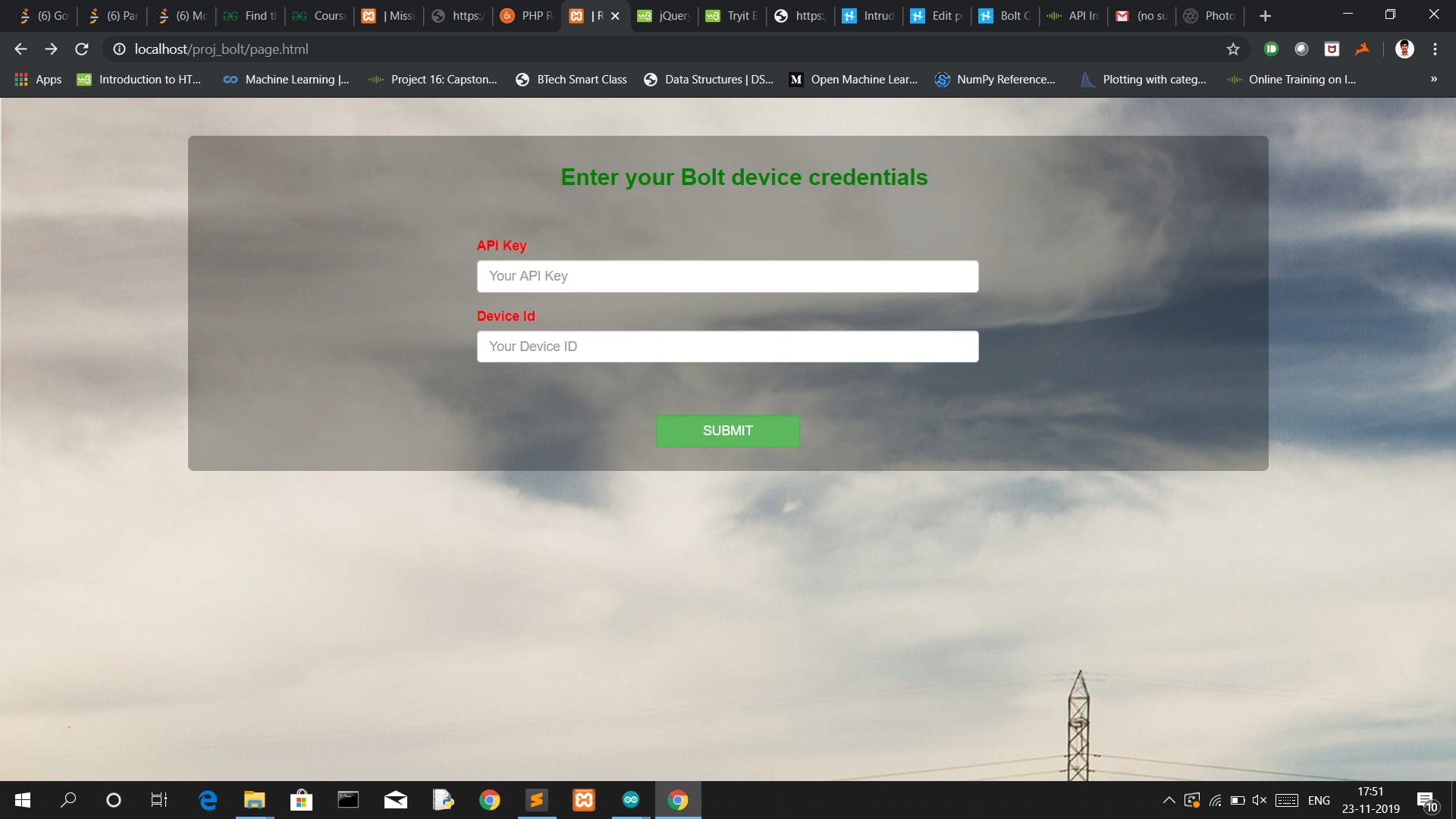
2. 存储库中的“page.html”是一个 Web 应用程序,它获取 Bolt 模块的设备 ID 和 API 密钥。
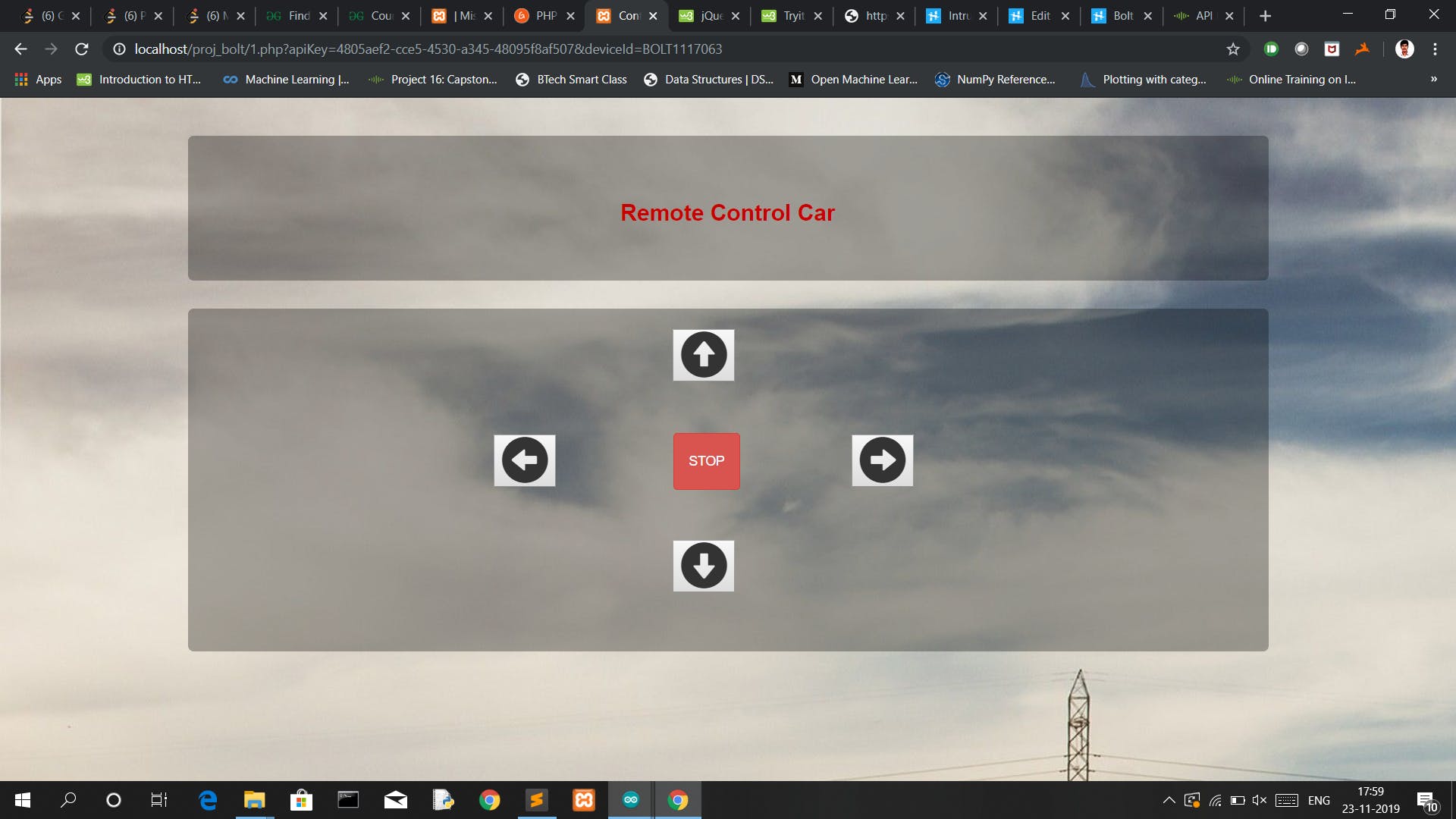
3. “1.php”是一个脚本页面,作为控制机器人小车的界面。
4.新建文件夹proj_bolt,把上面两个文件放在这个文件夹下,把这个新建的文件夹放在xampp的htdocs文件夹下。
注意:您可以从https://www.apachefriends.org/download.html下载 xampp
5.您现在可以使用以下链接运行“page.html”:
http://localhost/proj_bolt/page.html
工作流程
这里我们首先在xampp提供的本地服务器运行page.html提供的界面表单中输入我们bolt模块的详细信息,比如Device Id和API key 。初始界面页面显示为...
正确输入详细信息后,您将被重定向到以下页面,该页面将作为通过互联网控制机器人汽车的界面,即通过页面中提供的按钮,如下所示:
该项目工作背后的主要原则是……因为引脚 IN1、IN2、IN3、IN4 连接到 BOLT 模块的引脚 1、2、3、4。通过改变每个引脚的电压,我们可以改变每个电机的旋转方向,无论是顺时针还是逆时针。以下是可能的变化的详细信息......
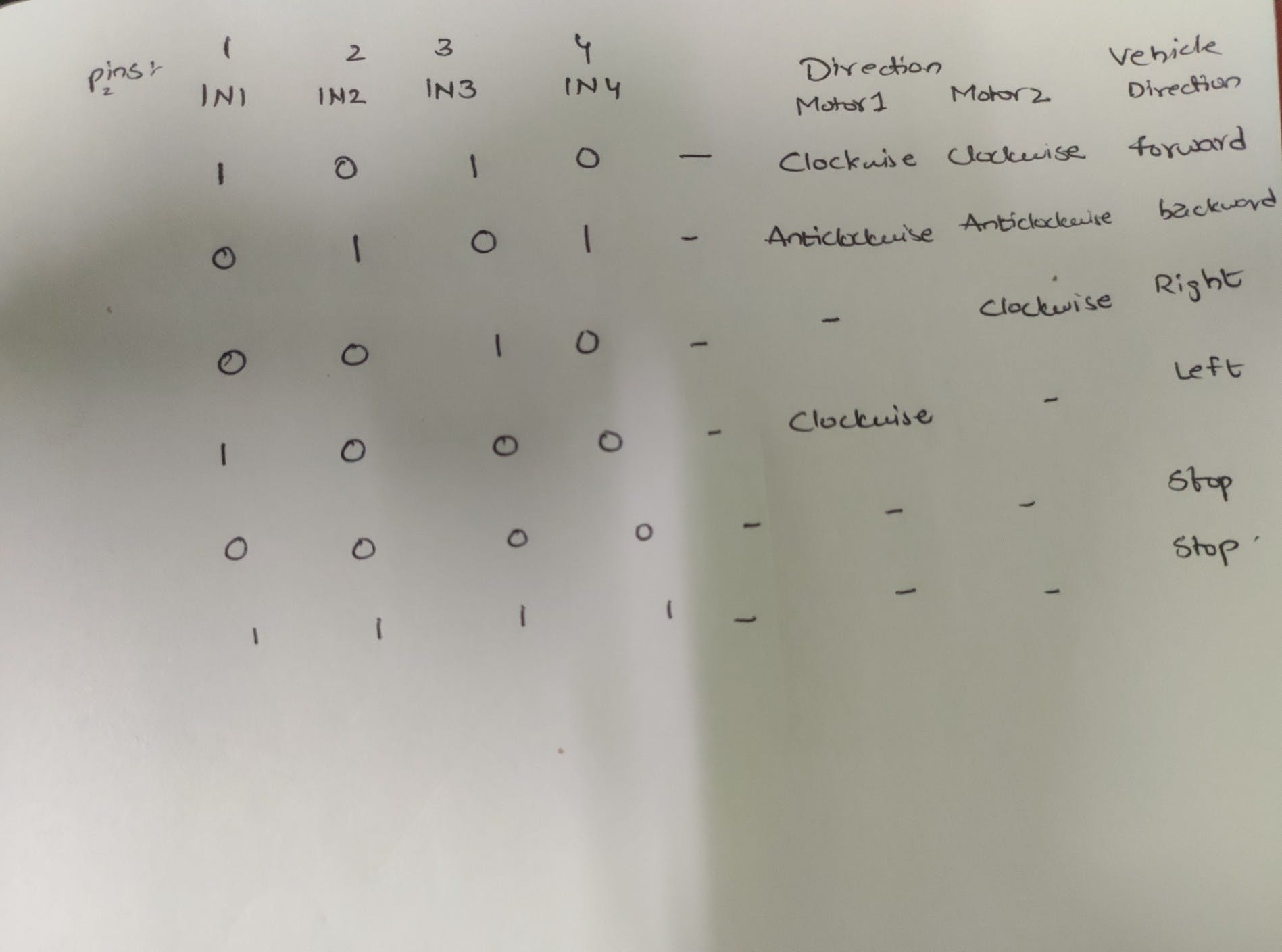
这里,
1 at pin x 表示 5V 由 pin x 提供。
pin x 处的 0 表示在 pin x 处提供 0V。
现在你有了一个遥控机器人,可以用它做任何你想做的事。可以用它做很多事情,你可以在上面附加一些传感器,或者让它自动运行,或者任何你想要的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






