
资料下载


基于Pynq的汽车仪表板
香香技术员
分享资料个
Pynq Instrument Cluster,正如我们所说的那样,是一个汽车混合仪表板,旨在成为 Xilinx 成本优化产品组合的平台演示者,以及在 GDL 的 Avnet 应用程序团队中为客户应用程序开发构建块的媒介。目的是展示用 Python 为 Xilinx 设备开发软件的简便性,以及如何通过将硬件模块连接到现有开发板来开发概念验证。这是一个正在进行的项目,预计将通过支持更多设备和硬件扩展来不断增加其功能。
硬件设计
我们得到了一些汽车步进电机、指示针和几个报废的仪表板面板。它们很实用,所以我们决定花一些时间建造一个机械结构来支撑它们以及相应的指示灯。它最初是用木雕制成的,这限制了很多功能。经过多次测试,它在 Fusion 360 中重新设计,分成 4 个组装块,并用白色 PLA 3D 打印。这提供了一个稳定、功能性和更好看的结构,并有助于培养基本的 3D 建模技能。
对于第一个版本,决定使用 WS2812 neopixel LED,与实际集群中使用的传统顶级 LED 相比,它具有以下几个优点:
1. 无需驱动程序。
2. 链上的单个可寻址设备。
3. 用于编程的单个 I/O。
4. 在一个单元中提供非常明亮的 LED 和 RGB 颜色。
5. 来自 Adam Taylor 的可用 IP。
尽管可以使用单个链对 55 个 LED 进行编程,并且只需要来自 Zynq 的单个 GPIO,我们还是决定将链分成四个部分,这样我们就可以进行 IP 复制,并稍微简化布线和组织软件中的映射。
为了展示 PS-PL 集成并利用 Zynq 器件中的大量逻辑资源,步进控制 IP 设计为在 PL 上运行,并且由于电机运行而需要使用电平转换器/电流驱动器在 5V。四个 L293D 设备焊接在面包板上,并为它们提供外部 5V 电源。
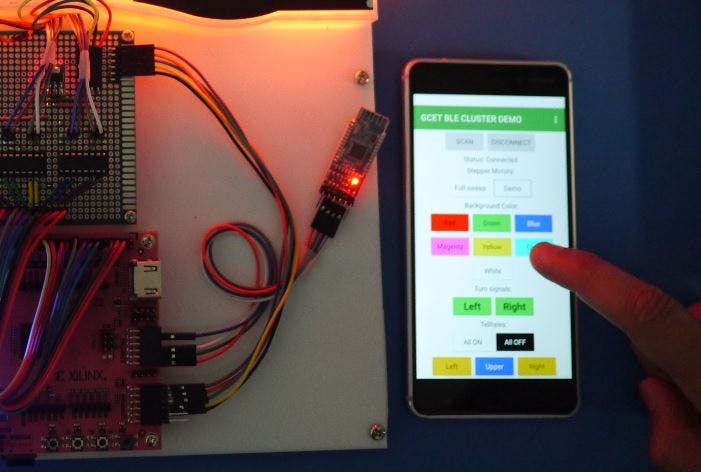
出于演示目的,使用 BLE 到 UART 模块将 Zynq 设备连接到在 MIT ai2 应用程序发明者平台中开发的 Android 应用程序。该应用程序非常简单,只需通过 BLE 连接将 ASCII 数据发送到模块,该模块又通过 UART 与 Zynq 进行通信。这些 ASCII 数据然后由 Python 程序读取,该程序在集群硬件上执行操作。我们可以改变 4 个表盘的背光颜色,打开和关闭信号灯和转向信号,并在面板的印刷范围内移动步进电机。
Vivado 中的 Pynq 覆盖开发
最初,步进电机的 IP 仅在 PL 中开发、模拟和测试。幸运的是 PynqZ1 和 Z2 设计允许这样做。IP 核需要使用 USB 转 UART 模块,因此我们可以设置步进电机移动的角度和方向。步进器控制的时钟最初在 200 kHz 下进行测试,该频率可以正常工作,但速度很慢。进一步的测试是在 400 和 500 kHz 下进行的,这提供了更好的运动。
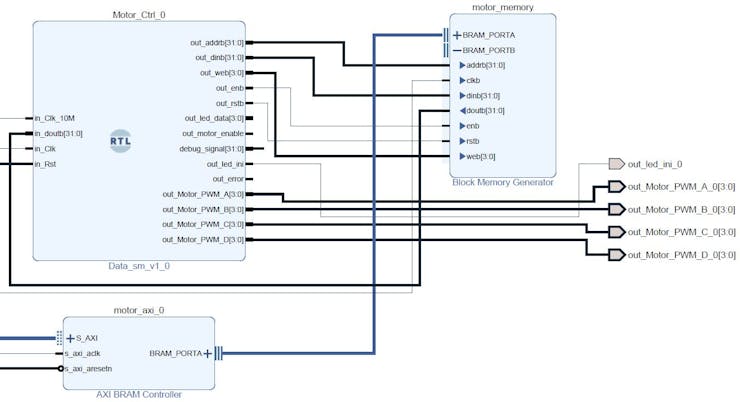
为了让 PS 访问 neopixel 和电机控制 IP,添加了几个 BRAM 接口和 AXI 到 BRAM 模块。
Jupyter Lab 中的 Python 最终应用
允许对正在运行的设计进行快速叠加更新。
未来的升级/扩展
1. 计划用闪亮的Ultra96 V2替换Pynq-Z2。但是我们仍然需要步进器的 5V 电平转换。
2. 启用中央显示器和扬声器。
3.添加内/后摄像头。
4. 添加多个环境传感器。
5. 支持运行 MicroBlaze 或 Arm Cortex 内核的 Spartan-7 设备,用于传感器集成 C 代码开发。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




