
资料下载


赛车仪表板(在线连接)开源分享
刘润生
分享资料个
描述
不再支持该项目的技术
BAJA-SAE 在全球范围内组织活动并邀请本科生参加。比赛包括制造和运行学生在许多不同的挑战中建造全地形车。该项目最初开始为驾驶员和维修站工作人员提供汽车性能的视觉展示。仪表板包括一个带有内置 SD 卡模块的 3.2 英寸 TFT 显示屏、一个 GPS 接收器和 NodeMCU,所有这些都与一个 Arduino Mega 接口。
仪表板显示包括:
- 车速表
- 钟
- 圈数计数器
- 里程表
- 性能计

仪表板使用 SkyTraq GPS 跟踪位置并计算速度,并将其显示在 LCD 显示屏上。数据还通过 NodeMCU 使用 PushingBox(作为 ESP 和 Google 之间的网关)实时上传到 Google 电子表格,机组人员可以访问该电子表格来跟踪车辆的位置和性能。主要功能的简要讨论如下:
圈数计数器
建立计圈器背后的想法是克服在比赛中没有任何单圈信息给车手的问题(显示板远离赛道)。计圈器的设计方式使其不需要赛道的先验信息,并在比赛期间建立其数据。它使用 GPS 来跟踪位置,并在每次进入初始起点后递增圈数计数器。
车速表和里程表
驾驶员的基本参数之一是车辆的当前速度,它是使用 GPS 的距离和时间测量来计算的。除了速度测量之外,还使用两个 GPS 点之间的距离测量来计算总行驶距离,所有数据都存储在 SD 卡模块中,并在 Google 电子表格中更新。
钟
车载时钟可提醒驾驶员距离比赛结束、加油计划和维护检查的剩余时间。
金属按钮
金属按钮可在显示选项之间轻松切换,并可作为系统的开启开关,并增加系统的最终外观。
节点单片机
NodeMCU 上传和更新谷歌电子表格,让项目全物联网!实现 NodeMCU 以将数据上传到电子表格是最棘手的部分。这是Stephen Borsay的一个很好的教程。
要进一步将电子表格链接到 Google Fusion 表并在地图上显示位置点,请按照以下教程中的步骤操作:
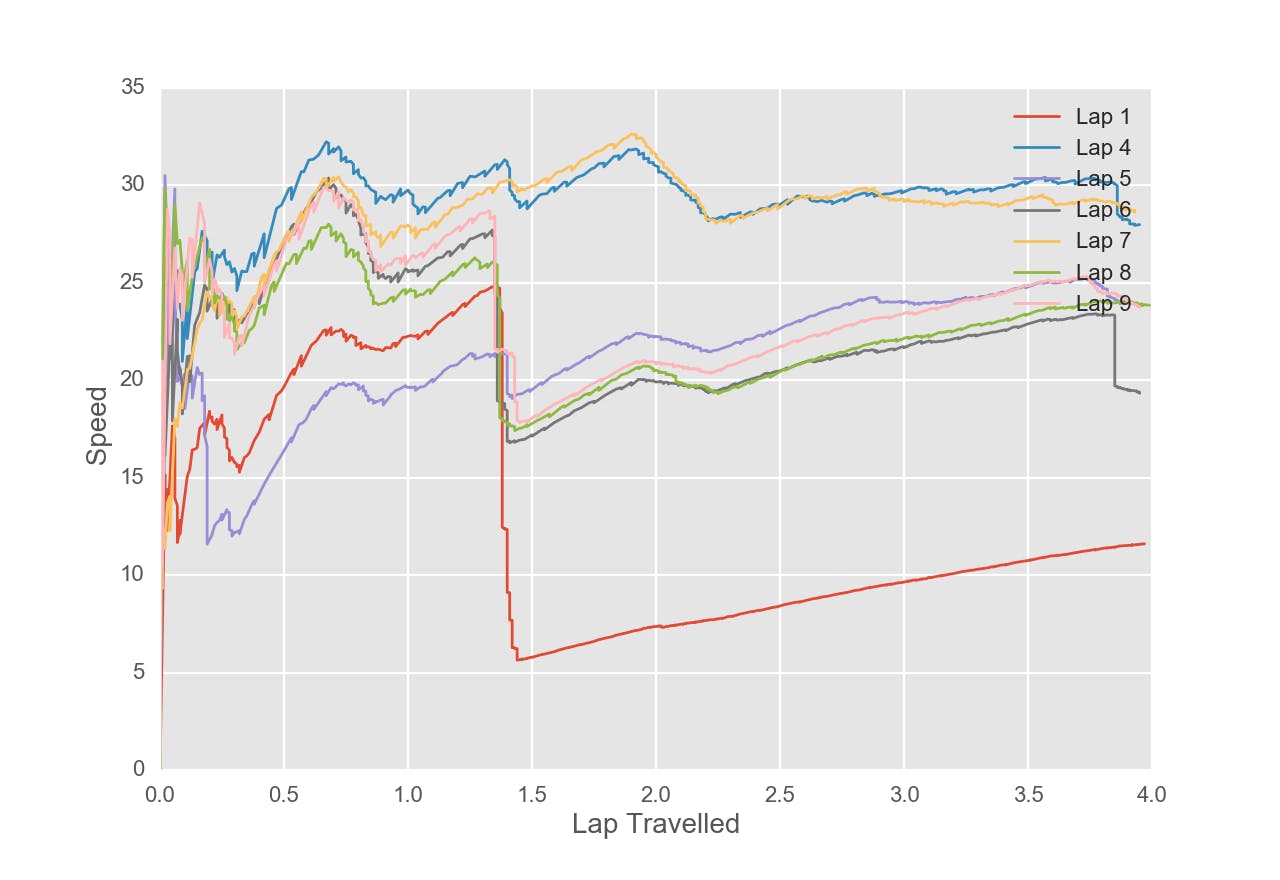
下面显示的是不同圈数的图形表示和数据比较,用于分析性能、优化加油和维护时间(使用 Python)。
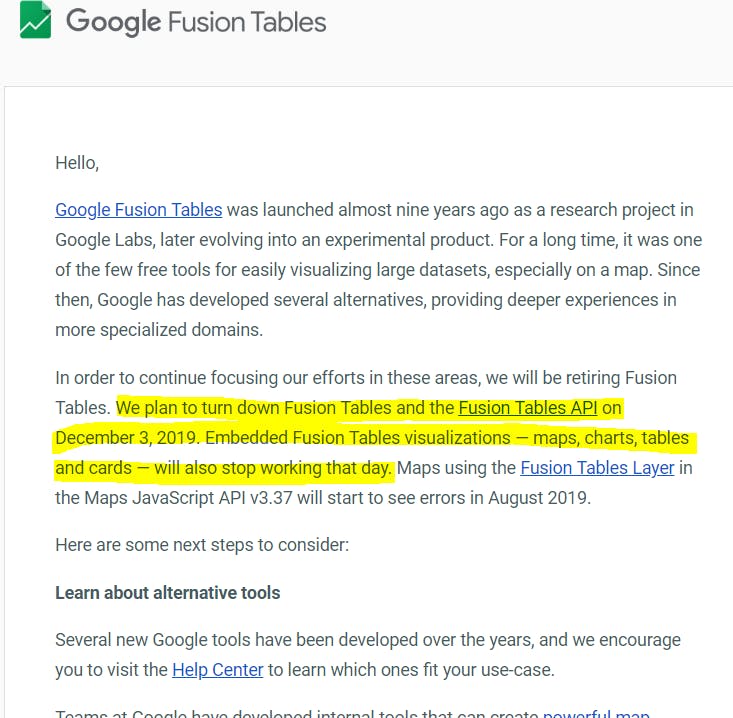
更新关于融合表:
Fusion Table 将于 2019 年 12 月 3 日被 google 拒绝。请在下面找到官方邮件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





