
资料下载


NRF24L01带操纵杆的无线伺服电机控制
分享资料个
描述
第 1 步:您需要什么

- 2X Arduino UNO(或任何其他 Arduino)
- 2X 伺服电机(如果没有 2 个伺服电机,也可以只使用一个)
- 2X nrf24l01 模块
- 摇杆模组
- 跳线
- Visuino 程序:下载 Visuino
第 2 步:由 PCBWay 带来
感谢 PCBWay 支持本教程并帮助用户了解更多电子产品。
我喜欢 PCBWay 的一点是,您可以以大约 5 美元的价格购买 10 块电路板,这对于专业制造的电路板来说确实具有成本效益,更不用说您节省了多少时间!
去这里看看。他们还提供许多其他东西,以备您可能需要时使用,例如组装、3D 打印、CNC 加工等等。
第 3 步:电路
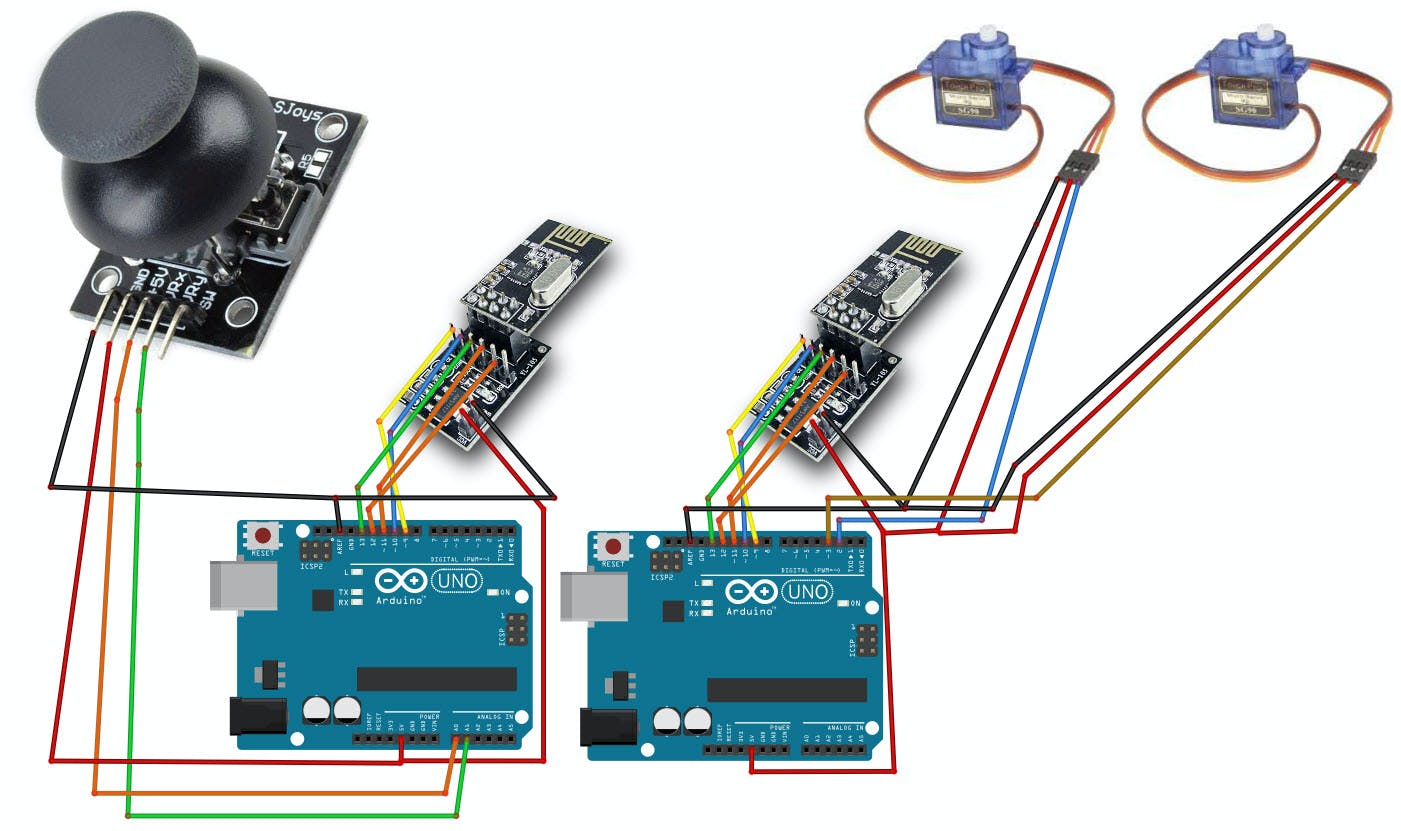
对于这个项目,我们使用 NRF24L01 模块和电压适配器。
连接发送器 Arduino:
- 将 NRF24L01 适配器引脚 [VCC] 连接到 Arduino 引脚 [5V]
- 将 NRF24L01 适配器引脚 [GND] 连接到 Arduino 引脚 [GND]
- 将 NRF24L01 适配器引脚“芯片启用”[CE] 连接到 Arduino 数字引脚 [9]
- 将 NRF24L01 适配器引脚“芯片选择”[CSN] 连接到 Arduino 数字引脚 [10]
- 将 NRF24L01 适配器引脚 [SCK] 连接到 Arduino 数字引脚 [13]
- 将 NRF24L01 适配器引脚 [MO] 连接到 Arduino 数字引脚 [11]
- 将 NRF24L01 适配器引脚 [MI] 连接到 Arduino 数字引脚 [12]
- 将操纵杆引脚 [VCC] 连接到 Arduino 引脚 [5V]
- 将操纵杆引脚 [GND] 连接到 Arduino 引脚 [GND]
- 将操纵杆引脚 [VRX] 连接到 Arduino 模拟引脚 [A0]
- 将操纵杆引脚 [VRY] 连接到 Arduino 模拟引脚 [A1]
连接接收器 Arduino:
- 将 NRF24L01 适配器引脚 [VCC] 连接到 Arduino 引脚 [5V]
- 将 NRF24L01 适配器引脚 [GND] 连接到 Arduino 引脚 [GND]
- 将 NRF24L01 适配器引脚“芯片启用”[CE] 连接到 Arduino 数字引脚 [9]
- 将 NRF24L01 适配器引脚“芯片选择”[CSN] 连接到 Arduino 数字引脚 [10]
- 将 NRF24L01 适配器引脚 [SCK] 连接到 Arduino 数字引脚 [13]
- 将 NRF24L01 适配器引脚 [MO] 连接到 Arduino 数字引脚 [11]
- 将 NRF24L01 适配器引脚 [MI] 连接到 Arduino 数字引脚 [12]
- 将伺服电机 1 引脚 [VCC] 连接到 Arduino 引脚 [5v]
- 将伺服电机 1 引脚 [GND] 连接到 Arduino 引脚 [GND]
- 将伺服电机 2 引脚 [VCC] 连接到 Arduino 引脚 [5v]
- 将伺服电机 2 引脚 [GND] 连接到 Arduino 引脚 [GND]
- 将伺服电机 1 引脚 [S] 连接到 Arduino 数字引脚 [2]
- 将伺服电机 2 引脚 [S] 连接到 Arduino 数字引脚 [3]
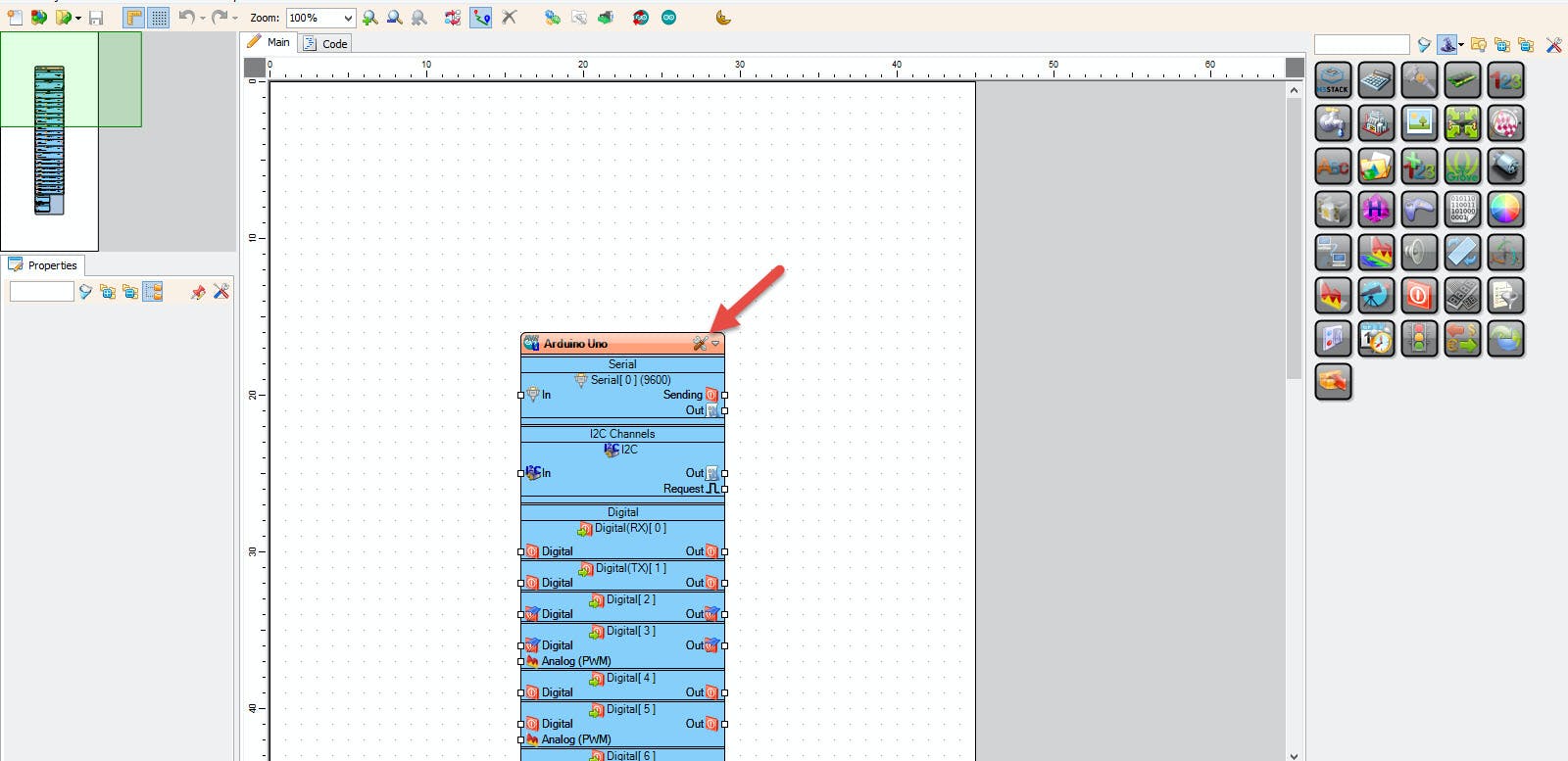
第 4 步:启动 Visuino,并选择 Arduino UNO 板类型
Visuino:https ://www.visuino.eu也需要安装。下载免费版本或注册免费试用。
如图1所示启动Visuino 单击Visuino中Arduino组件(图1)上的“工具”按钮 出现对话框时,选择“Arduino UNO”,如图2所示
第 5 步:对于发送器 Arduino - 在 Visuino 中添加、设置和连接组件
- 添加“操纵杆”组件
- 添加“制作结构”组件
- 添加“ NRF24L01 Wireless ”组件
- 双击“ MakeStructure1 ”并在“ Elements ”窗口中将 2X“ Analog ”拖到左侧
- 关闭“元素”窗口
- 将Arduino模拟引脚 [0]连接到“ Joystick1 ”>“ Axis X ”引脚 [In]
- 将Arduino模拟引脚 [1]连接到“ Joystick1 ”>“ Y 轴”引脚 [In]
- 将“ Joystick1 ”>“ Axis X ”引脚 [Out] 连接到“ MakeStructure1 ”>“ Analog1 ”引脚 [In]
- 将“ Joystick1 ”>“ Y 轴”引脚 [Out] 连接到“ MakeStructure1 ”>“ Analog2 ”引脚 [In]
- 将“ MakeStructure1 ”引脚 [Out] 连接到“ NRF24L011 ”引脚 [In]
- 将“ NRF24L011 ”引脚接口 [SPI] 连接到Arduino板引脚 [SPI]
- 将“ NRF24L011 ”引脚 [Chip Select] 连接到Arduino板数字引脚 [10]
- 将“ NRF24L011 ”引脚[芯片启用]连接到Arduino板数字引脚[9]
将项目上传到 Arduino 开发板(请参阅生成、编译和上传 Arduino 代码步骤)
第 6 步:对于接收器 Arduino - 在 Visuino 中添加、设置和连接组件
- 添加“拆分结构”组件
- 添加 2X“伺服”组件
- 添加“ NRF24L01 Wireless ”组件
- 双击“ SplitStructure1 ”并在“ Elements ”窗口中将 2X“ Analog ”拖到左侧
- 关闭“元素”窗口
- 将“ NRF24L011 ”引脚接口 [SPI] 连接到Arduino板引脚 [SPI]
- 将“ NRF24L011 ”引脚 [Chip Select] 连接到Arduino板数字引脚 [10]
- 将“ NRF24L011 ”引脚[芯片启用]连接到Arduino板数字引脚[9]
- 将“ NRF24L011 ”引脚[Out]连接到“ SplitStructure1 ”引脚[In]
- 将“ SplitStructure1 ”>“ Analog1 ”引脚[Out]连接到“ Servo1 ”引脚[In]
- 将“ SplitStructure1 ”>“ Analog2 ”引脚[Out]连接到“ Servo2 ”引脚[In]
- 将“ Servo1 ”引脚 [Out] 连接到Arduino板数字引脚 [2]
- 将“ Servo2 ”引脚 [Out] 连接到Arduino板数字引脚 [3]
将项目上传到 Arduino 开发板(请参阅生成、编译和上传 Arduino 代码步骤)
第 7 步:生成、编译和上传 Arduino 代码
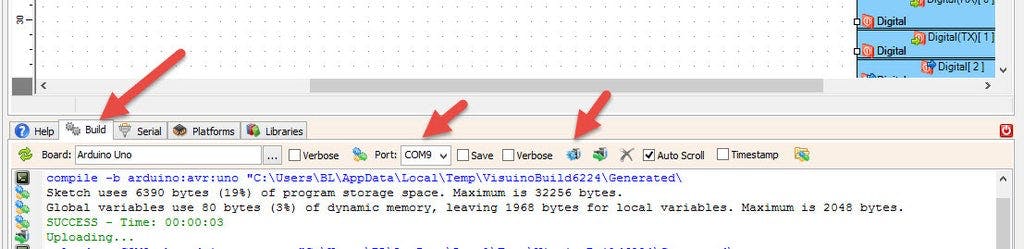
在 Visuino 中,单击底部的“Build”选项卡,确保选择了正确的端口,然后单击“Compile/Build and Upload”按钮。
第 8 步:播放
如果为 Arduino 模块供电并移动操纵杆,连接到接收器 Arduino 的伺服电机将开始移动。
恭喜!您已经使用 Visuino 完成了您的项目。还附上了我为本教程创建的发送方和接收方的 Visuino 项目文件,您可以下载它并在 Visuino 中打开它
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






