
资料下载


如何用Arduino制作遥控机械手
周棠亨
分享资料个
描述
这是我高中五年级的学校项目(我是意大利人,我们有 5 年的高中)。
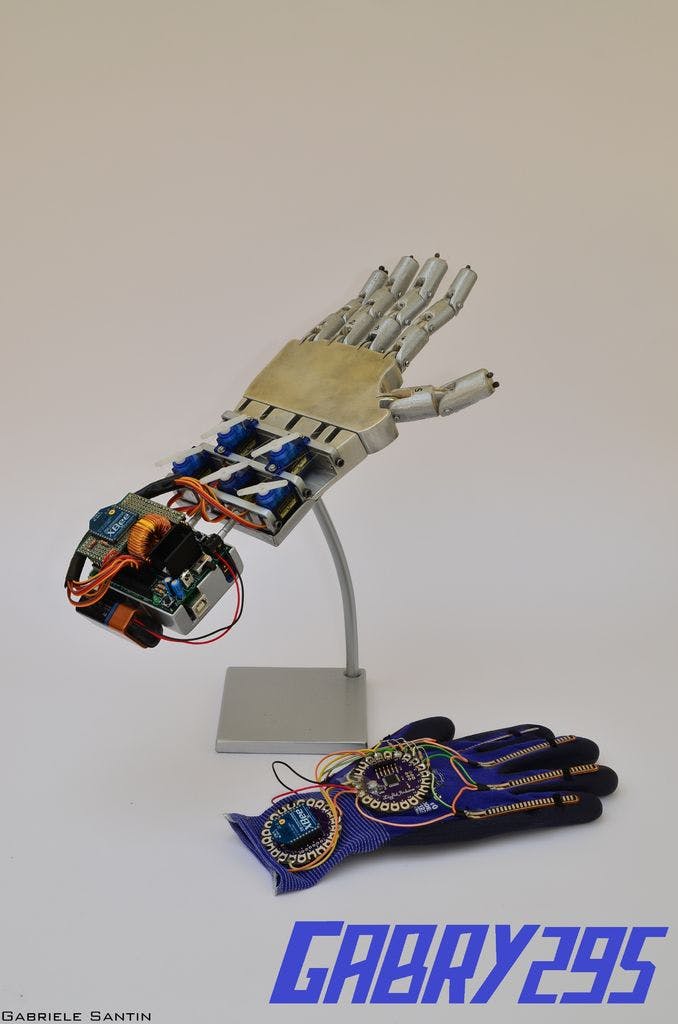
它包含一只由带有柔性传感器的手套控制的人造手。仿真手通过无线方式再现了带有控制手套的手的动作。手和手套都适用于 Arduino。
我只是想为所有感兴趣的人分享我的工作:)
本指南仍在开发中,抱歉,如果某些部分不清楚,我会在以后放一些 3D 图像。
第 1 步:所需材料
1 / 4
控制手套的材料:
•弹性手套;
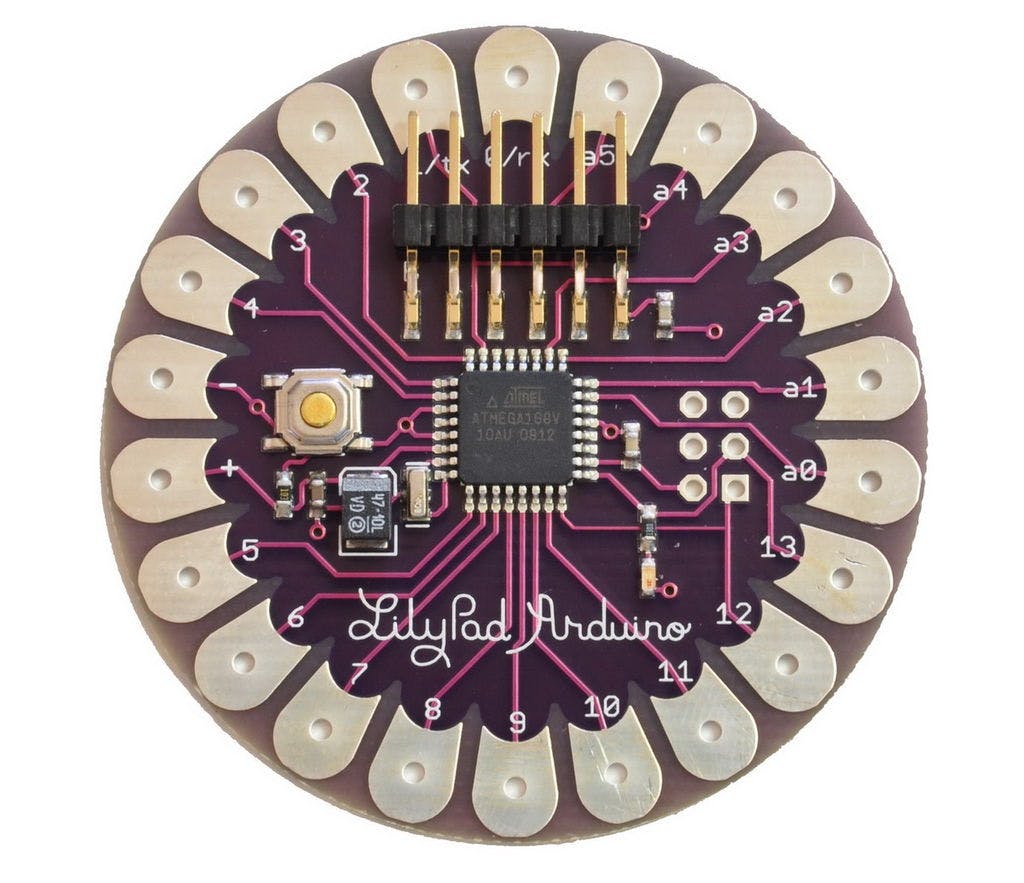
•LilyPad Arduino板(有不同的版本,通常只有 4 个模拟输入,所以请注意并购买图中的那个):它的工作原理与经典的 Arduino UNO 完全一样,因此您甚至可以使用 Arduino Nano,但要付费注意所需的电压;
•XBee 模块:用于无线电通信;
•用于连接Xbee模块的屏蔽层;
• 5 个柔性传感器;
• 5 个电阻:47 KΩ;
•带3x1.5 V电池的电池组(Lilypad 可以从2.7 到5.5 V 供电,所以4.5 V 没问题);
•LilyPad FTDI 适配器:将 LilyPad 板连接到 PC 并使用 Arduino IDE 加载程序(非常可选,因为您也可以使用 Arduino UNO 板移除 ATmega 芯片,但每次都进行这种连接很棘手) .
-机械手的材料:
•手掌为钢结构,手指为木结构。
•Arduino UNO 开发板;
•XBee 模块;
• 5 个伺服电机5V 供电(我用的是 TowerPro SG90);
• Arduino UNO 的伺服电机屏蔽:为了连接伺服电机,我使用了FuturaElettronica的 Robot_Shield,它还有一个开关稳压器来为整个电路供电,但您可以使用任何用于控制伺服电机的屏蔽。链接:https://store.open-electronics.org/index.php?_rou... ;
•用于连接XBee模块的屏蔽(我做了一个糟糕的,但它很经济,而且由于Robot_Shield 的尺寸,我需要做一个小的);
•钓鱼线;
•(可选)钓鱼坠子,用于固定钓鱼线,也可以简单地打个结;
•9 伏电池。
- 需要的工具:
•角磨机(主要用于切割木材和钢材);
•轴向磨床;
•焊机(带电极);
•钻孔;
•焊台和焊料;
• 电工剪刀;
•钳子;
•热缩管。
第 2 步:制作手套
1 / 4
要制作控制手套,我建议首先选择不同组件的正确位置,然后用适当长度的电线连接所有部件。
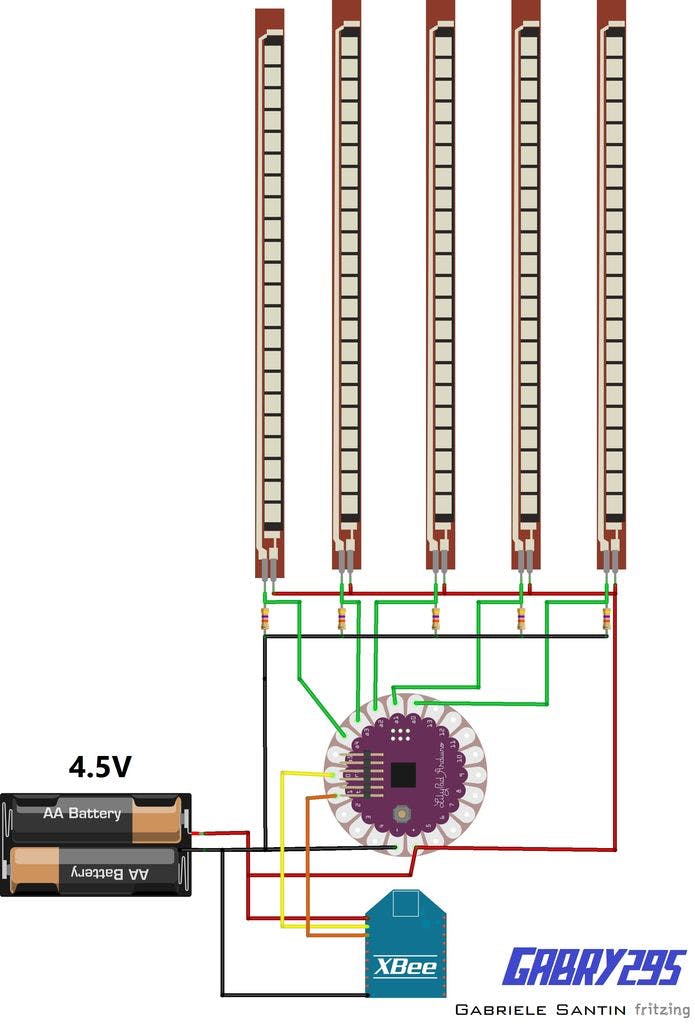
要使用 Arduino LilyPad 进行模拟读取,您需要制作一个分压器,因为柔性传感器不像电位器那样工作(它们只有 2 个触点)。
所以按照方案,首先将 5 个电阻焊接到 LilyPad 板上,一侧连接到 5 个不同的模拟引脚,另一侧共同接地。然后焊接柔性传感器,一侧连接到 5 个不同的模拟引脚,另一侧连接到正极。
然后连接 XBee Shield:两根线用于电源,另外两根用于信号。将 Tx 引脚焊接到 Rx,反之亦然。
现在你需要电池组和手套了。
小心:不要为 Arduino LilyPad 供电超过 5.5 V,也不要反过来供电(即使有时我错误地做到了......它仍然有效!)
第 3 步:制作机械手

1 / 11
这是最复杂的部分,因为你必须选择合适的材料来制作手,但如果你有可能 3D 打印手也可以很容易(网上有许多不同的 3D 项目用于打印手部分).
我开始用软木做手指,为动作找到合适的结构,然后我用树枝做。
因此,每个手指制作三个木制圆柱体,其中两个比指骨的正常长度高出 1 厘米,需要将一个圆柱体放入另一个圆柱体中。
然后用角磨机制作凹槽,使零件装配在一起(看图片,你会更好地理解)。
您需要一些砂纸来使零件弯曲,以便它们可以旋转。
使用钻头为铰链打孔,然后你必须为钓鱼线打另外两个孔,垂直,一个朝向手的内侧,一个向外。所以当电线放在手指的顶部时,当你向内拉一根时,手指会闭合,当你向外拉时,手指会张开。
手掌有问题,因为我最初是用木头做的,而且较薄的部分总是坏掉。所以我决定用钢做它,我没有遇到任何问题。
切割它并做一些类似于为手指制作的突起以将它们固定到手掌上(参见图像作为参考)。然后用钻头为钓鱼线钻其他孔,拇指会很棘手,因为它不像其他手指那样垂直。
制作好手之后,需要制作五个伺服电机的支架和Arduino UNO板的支架。一定要选择正确的舵机位置,这样它们在旋转时不会相互接触。
最后一部分是将手指连接到伺服电机:将鱼线固定在手指的顶部并使其穿过孔;然后,当电线位于手的底部时,以最大旋转 (180°) 转动转子(手动,不通电),使其处于垂直位置,然后将闭合手指的电线设置为最低转子的孔,例如打结;再次转动转子 0°(再次垂直,之前打的结在顶部)然后将另一根线(打开手指)设置到转子的最低孔。按照此步骤中的最后一张图片可以更好地理解。
因此,当电机处于 0°(垂直)时,手指打开,当转子处于 180°(再次垂直)时,手指闭合。
第 4 步:机械手电路
1 / 7
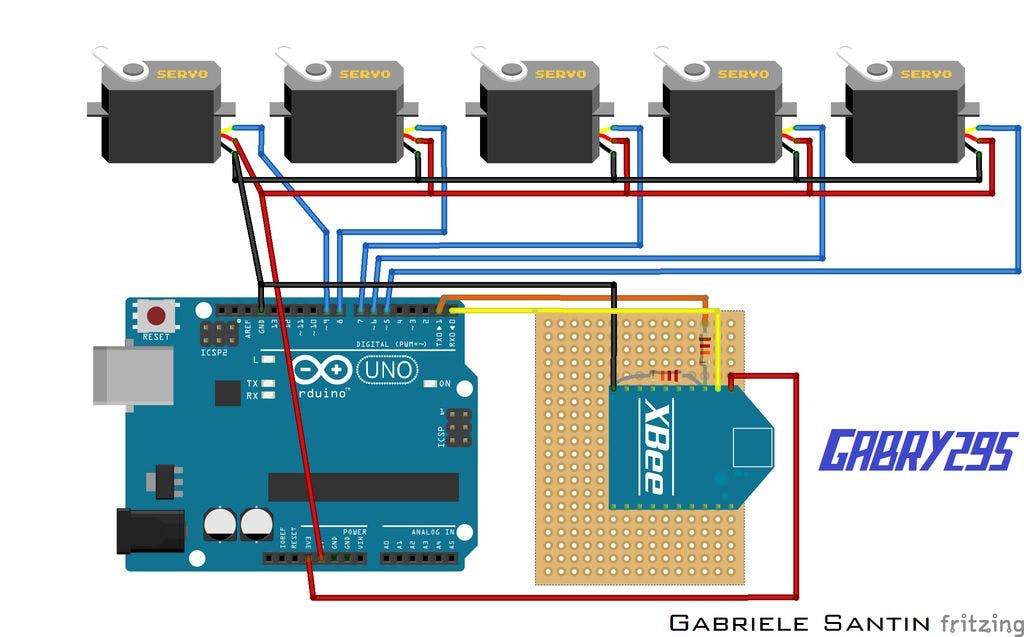
对于电路,您可以选择使用 Arduino UNO 的伺服电机屏蔽(在 eBay 或亚马逊上搜索)和 XBee 屏蔽,或者使用 XBee 模块和引脚制作自定义屏蔽(我会尽快制作)用于伺服电机,并通过其插孔端口为 Arduino UNO 供电。
我自己DIY的XBee Shield用了一个12KOhm的电阻和一个22KOhm的电阻,大家可以看图中的接线。
所以我使用了我之前买的东西,但是你可以使用任何可以控制伺服电机和 XBee 的东西。
伺服电机有 3 根线:
黄色:信号(连接到数字引脚);
红色:电源(+5 V);
棕色:接地(GND)。
所以现在你不会犯错了:)
我使用了最简单的伺服电机,工作电压为 5 V,旋转角度为 180 度(这是完美的角度,我们不需要更多)。
电脑的USB接口无法提供足够的电力来控制5个伺服电机,所以我建议使用12V电源测试一切,然后使用9V电池(最好是碱性电池)。
第 5 步:程序
手和手套的程序以及所有描述都在下面的链接中。
请记住:要加载程序,您必须移除连接到 Arduino 的 TX 和 RX 引脚的所有内容(在本例中为 XBee 模块),否则程序将无法加载。还要记住在 IDE 中设置正确类型的 Arduino(LilyPad 或 Arduino UNO)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






