
资料下载


×
机械臂电路设计开源合集,电机工程师们的杰作
消耗积分:5 |
格式:rar |
大小:25.27 MB |
2019-10-15
分享资料个
机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手臂有多种用途,不仅可以安装在机器人身上,也可以给残疾人用来当假肢。作为一个工程师,打造出一个机械臂不仅是很酷更是很有意义的一件事,现分享几款精彩的机械臂的设计,寻找属于你的灵感吧!
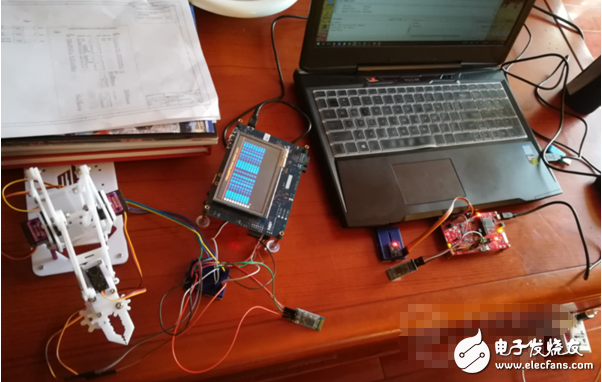
1、【2017贸泽大赛】三等奖作品:通过简单的手势控制机械臂运动
本系统是采用CC3220s与LPC54608制作的手势控制的机械臂系统。可以完成通过简单的手势对机械臂的控制。手势识别指令采用的是MPU6050以及CC3220S自带的BMA222加速度计组合采集的。CC3220S作为手势端,将采集到的角度值进行分析、滤波、修正之后通过蓝牙发送给LPC54608,其中LPC54608作为控制端,与舵机相连,接收手势命令,通过滤波、限幅与消抖之后控制舵机,进而完成机械臂的运动。通信采用蓝牙进行,CC3220S将需要传输的数据进行处理封装、打包,通过串口进行发送,LPC54608将接收到的数据进行解析,防止出错。经实物验证,功能能够实现。
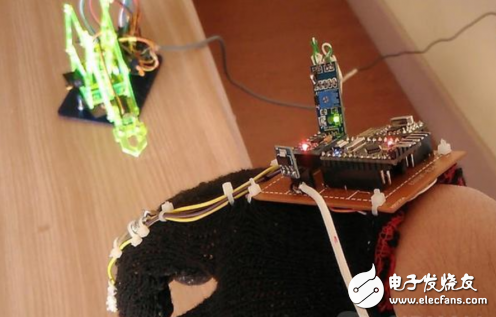
2、手部运动控制机器人手臂
由nRF24l01分线板和Arduino Pro Mini供电的发射器电路连接到手套上。该电路还包含IMU和柔性传感器。
对于这个项目,使用了DIY flex传感器:
柔性传感器在管的两端包含光发射器和接收器。当管弯曲时,光接收器接收较少的光,从而检测弯曲。
该MPU6050 IMU 检测转动手腕。检测到运动并通过nRF24L01收发器发送到接收电路。
接收器电路对来自发射器的数据进行解码,并相应地移动四伺服机械臂。使用的机械臂是MeARM的机械臂。
3、Android控制的6DoF机器人手臂
大多数6DoF机械臂配有一个带RS-232的控制板,用于桌面控制,我们简单地调整控件以便与Android设备一起使用。
我们获得了机器人手臂作为学习在线项目共享平台上发布项目的应用程序,我们决定调整手臂使用Android智能手机进行远程控制。
大多数市场上可用的机器人手臂都配有控制板,配有RS-232接口,可通过桌面软件进行控制,据评论此板和附带的软件往往不可靠,因此我们决定取消这部分,而是用arduino uno代替1sheeld shield与Android智能手机无缝连接。

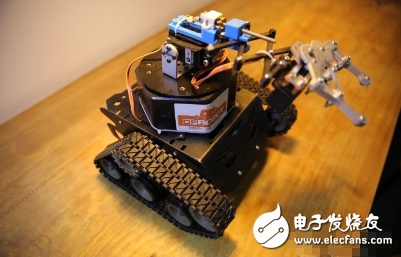
4、3D打印机械手臂,带抓取功能的机器人
你有没有想过让自己做的机器人拥有动手能力呢?出于这个想法,我打算把履带小车结合夹持器做一个有抓取功能的小车。由于装在小车上方难以抓到地面上的东西,因此还需要给小车增加伸缩的功能。使用3D打印机打印一个可以伸缩的支架,并找了一个可以配合的螺纹电机来实现伸缩功能。
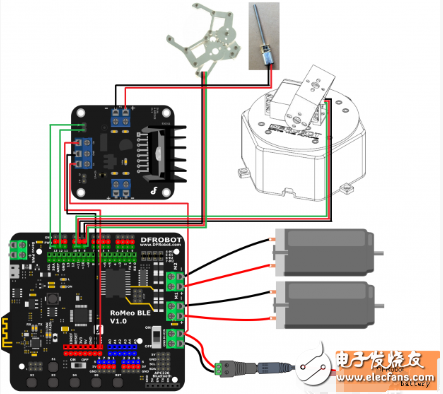
组装过程:
1.用3D打印机打印伸缩臂的零件,并用螺丝组装起来。另外还打印螺纹电机的支架,把螺纹电机和伸缩臂组装起来。(模型在附件里)
2.将蜂巢云台装在履带机器人上。
3.在云台上使用舵机支架套件来安装一个舵机。
4.把螺纹电机装在舵机上。
5.把另一个舵机装在夹持器上,使它可以做抓取动作。
6.把夹持器的舵机固定到伸缩臂上。
使用下图进行连接:
1、【2017贸泽大赛】三等奖作品:通过简单的手势控制机械臂运动
本系统是采用CC3220s与LPC54608制作的手势控制的机械臂系统。可以完成通过简单的手势对机械臂的控制。手势识别指令采用的是MPU6050以及CC3220S自带的BMA222加速度计组合采集的。CC3220S作为手势端,将采集到的角度值进行分析、滤波、修正之后通过蓝牙发送给LPC54608,其中LPC54608作为控制端,与舵机相连,接收手势命令,通过滤波、限幅与消抖之后控制舵机,进而完成机械臂的运动。通信采用蓝牙进行,CC3220S将需要传输的数据进行处理封装、打包,通过串口进行发送,LPC54608将接收到的数据进行解析,防止出错。经实物验证,功能能够实现。
2、手部运动控制机器人手臂
由nRF24l01分线板和Arduino Pro Mini供电的发射器电路连接到手套上。该电路还包含IMU和柔性传感器。
对于这个项目,使用了DIY flex传感器:
柔性传感器在管的两端包含光发射器和接收器。当管弯曲时,光接收器接收较少的光,从而检测弯曲。
该MPU6050 IMU 检测转动手腕。检测到运动并通过nRF24L01收发器发送到接收电路。
接收器电路对来自发射器的数据进行解码,并相应地移动四伺服机械臂。使用的机械臂是MeARM的机械臂。
大多数6DoF机械臂配有一个带RS-232的控制板,用于桌面控制,我们简单地调整控件以便与Android设备一起使用。
我们获得了机器人手臂作为学习在线项目共享平台上发布项目的应用程序,我们决定调整手臂使用Android智能手机进行远程控制。
大多数市场上可用的机器人手臂都配有控制板,配有RS-232接口,可通过桌面软件进行控制,据评论此板和附带的软件往往不可靠,因此我们决定取消这部分,而是用arduino uno代替1sheeld shield与Android智能手机无缝连接。
你有没有想过让自己做的机器人拥有动手能力呢?出于这个想法,我打算把履带小车结合夹持器做一个有抓取功能的小车。由于装在小车上方难以抓到地面上的东西,因此还需要给小车增加伸缩的功能。使用3D打印机打印一个可以伸缩的支架,并找了一个可以配合的螺纹电机来实现伸缩功能。
组装过程:
1.用3D打印机打印伸缩臂的零件,并用螺丝组装起来。另外还打印螺纹电机的支架,把螺纹电机和伸缩臂组装起来。(模型在附件里)
2.将蜂巢云台装在履带机器人上。
3.在云台上使用舵机支架套件来安装一个舵机。
4.把螺纹电机装在舵机上。
5.把另一个舵机装在夹持器上,使它可以做抓取动作。
6.把夹持器的舵机固定到伸缩臂上。
使用下图进行连接:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(2)
发评论
-
 修瑞娜娜
2021-03-26
0 回复 举报nice。。。。。。。。。 收起回复
修瑞娜娜
2021-03-26
0 回复 举报nice。。。。。。。。。 收起回复
-
 hqto188
2020-07-28
0 回复 举报谢谢楼主分享,正好在学习这方面的知识 收起回复
hqto188
2020-07-28
0 回复 举报谢谢楼主分享,正好在学习这方面的知识 收起回复
- 相关下载
- 相关文章





