
资料下载


使用EMG的机械手控制
386660
分享资料个
描述
我们的团队在机器人手方面有着悠久的历史。有一段时间我们试图制作一个可靠的假手,但对于这个项目,我使用了现有开源手的一个很好的例子:inMoov 。
我不会详细介绍手动组装 - 在项目网站上对此进行了很好的描述,并且非常复杂。我将在这里专注于控制,因为这是全新的 :)
另外,在下一个项目中查看这项技术如何随着时间的推移而发展
1.信号处理
控制基于 EMG - 肌肉的电活动。EMG 信号由三个 uECG 设备获得(我知道,它应该是 ECG 监视器,但由于它基于通用 ADC,它可以测量任何生物信号 - 包括 EMG)。对于 EMG 处理,uECG 有一个特殊的模式,它发出 32 段频谱数据和“肌肉窗口”平均值(平均频谱强度在 75 和 440 Hz 之间)。光谱图像如下所示:
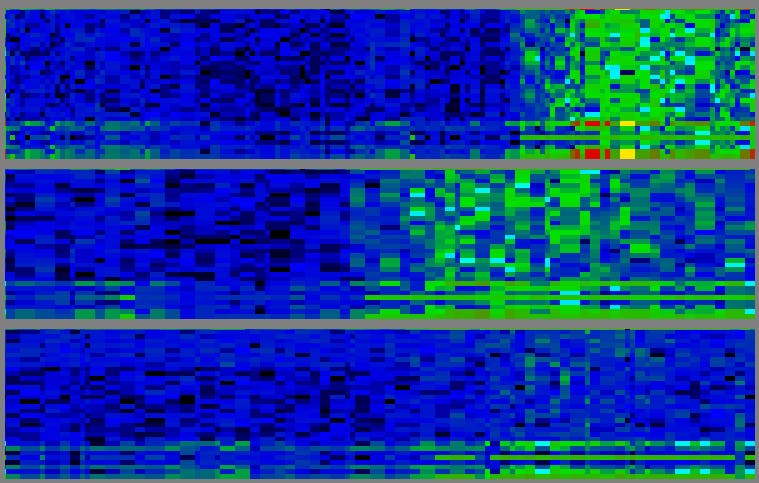
这里的频率在垂直轴上(在 3 个图的每一个上,底部的低频,顶部的高频率 - 从 0 到 488 Hz,步长约为 15 Hz),时间在水平轴上(左侧的旧数据总体在这里屏幕上大约 10 秒)。强度用颜色编码:蓝色 - 低,绿色 - 中,黄色 - 高,红色 - 甚至更高。为了可靠的手势识别,需要对这些图像进行适当的 PC 处理。但是对于机器人手指的简单激活,仅使用 3 个通道上的平均值就足够了 - uECG 可以方便地在某些数据包字节处提供它,以便 Arduino 草图可以解析它。这些值看起来要简单得多:
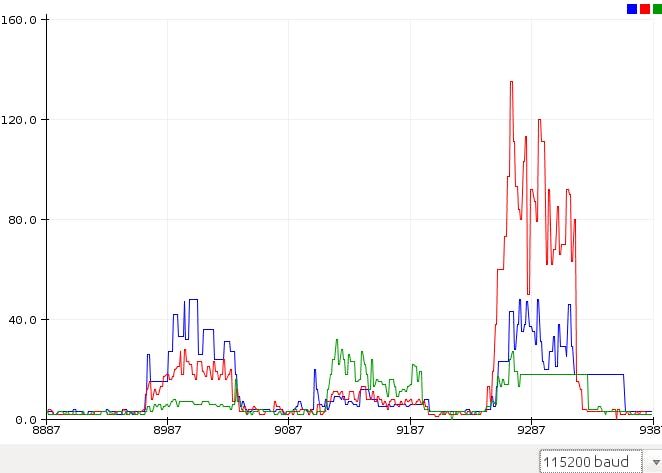
当我相应地挤压拇指、无名指和中指时,红色、绿色、蓝色图表是来自不同肌肉群的 uECG 设备的原始值。在我们看来,这些情况显然是不同的,但我们需要以某种方式将这些值转换为“手指分数”,以便程序可以将值输出到手动伺服系统。问题是,来自肌肉群的信号是“混合的”:在第一种和第三种情况下,蓝色信号强度大致相同 - 但红色和绿色不同。在第 2 和第 3 种情况下,绿色信号是相同的 - 但蓝色和红色是不同的。为了“解开”它们,我使用了一个相对简单的公式:
S0=V0^2 / ((V1 *a0 +b0)(V2 * c0+d0))
其中 S0 - 通道 0、V0、V1、V2 的得分 - 通道 0、1、2 和 a、b、c、d 的原始值 - 我手动调整的系数(a 和 c 从 0.3 到 2.0,b 和d 分别为 15 和 20,无论如何您都需要更改它们以适应您的特定传感器位置)。为通道 1 和 2 计算了相同的分数。在此之后,图表变得几乎完全分离:
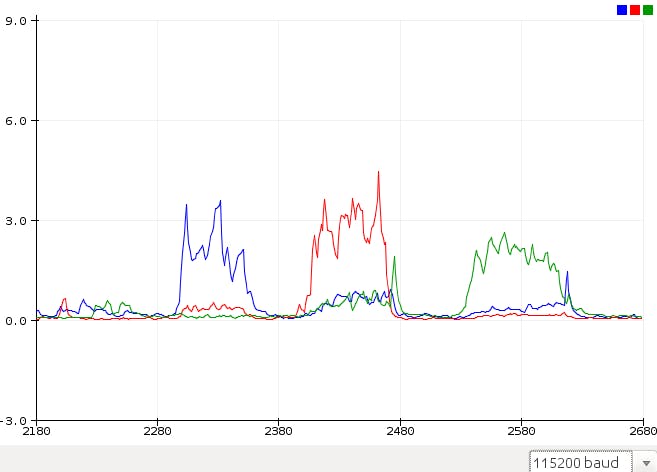
对于相同的手势(这次是无名指、中指和拇指),信号很清晰,只需与阈值比较即可轻松转换为伺服运动。
2. 原理图
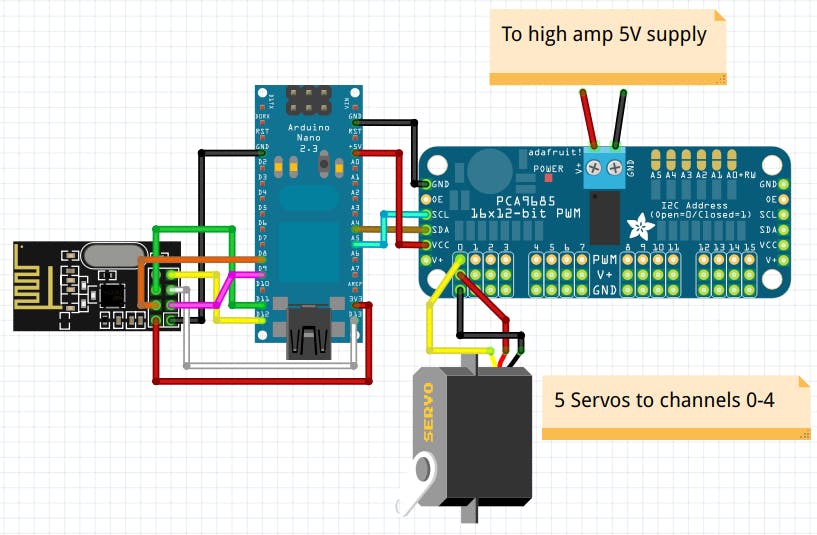
原理图非常简单,您只需要 nRF24 模块、PCA9685 或类似的 I2C PWM 控制器,以及足以同时移动所有这些舵机的高安培 5V 电源(因此它需要至少 5A 的额定功率才能稳定运行)。
连接列表:
nRF24 pin 1 (GND) - Arduino 的 GND
nRF24 pin 2 (Vcc) - Arduino 的 3.3v
nRF24 pin 3 (Chip Enable) - Arduino's D9
nRF24 pin 4 (SPI:CS) - Arduino's D8
nRF24 pin 5 (SPI: SCK) - Arduino 的 D13
nRF24 引脚 6 (SPI:MOSI) - Arduino 的 D11
nRF24 引脚 7 (SPI:MISO) - Arduino 的 D12
PCA9685 SDA - Arduino 的 A4
PCA9685 SCL - Arduino 的 A5
PCA9685 Vcc - Arduino 的 5v
PCA9685 GND - Arduino 的 GND
PCA9685 V+ -高放大器 5V
PCA9685 GND - 高放大器 GND
手指伺服:到 PCA 通道 0-4,在我的符号中拇指 - 通道 0,食指 - 通道 1 等。
3. EMG 传感器放置
为了获得合理的读数,将记录肌肉活动的 uECG 设备放置在正确的位置非常重要。虽然这里有许多不同的选项,但每个选项都需要不同的信号处理方法 - 所以我分享我用过的东西:
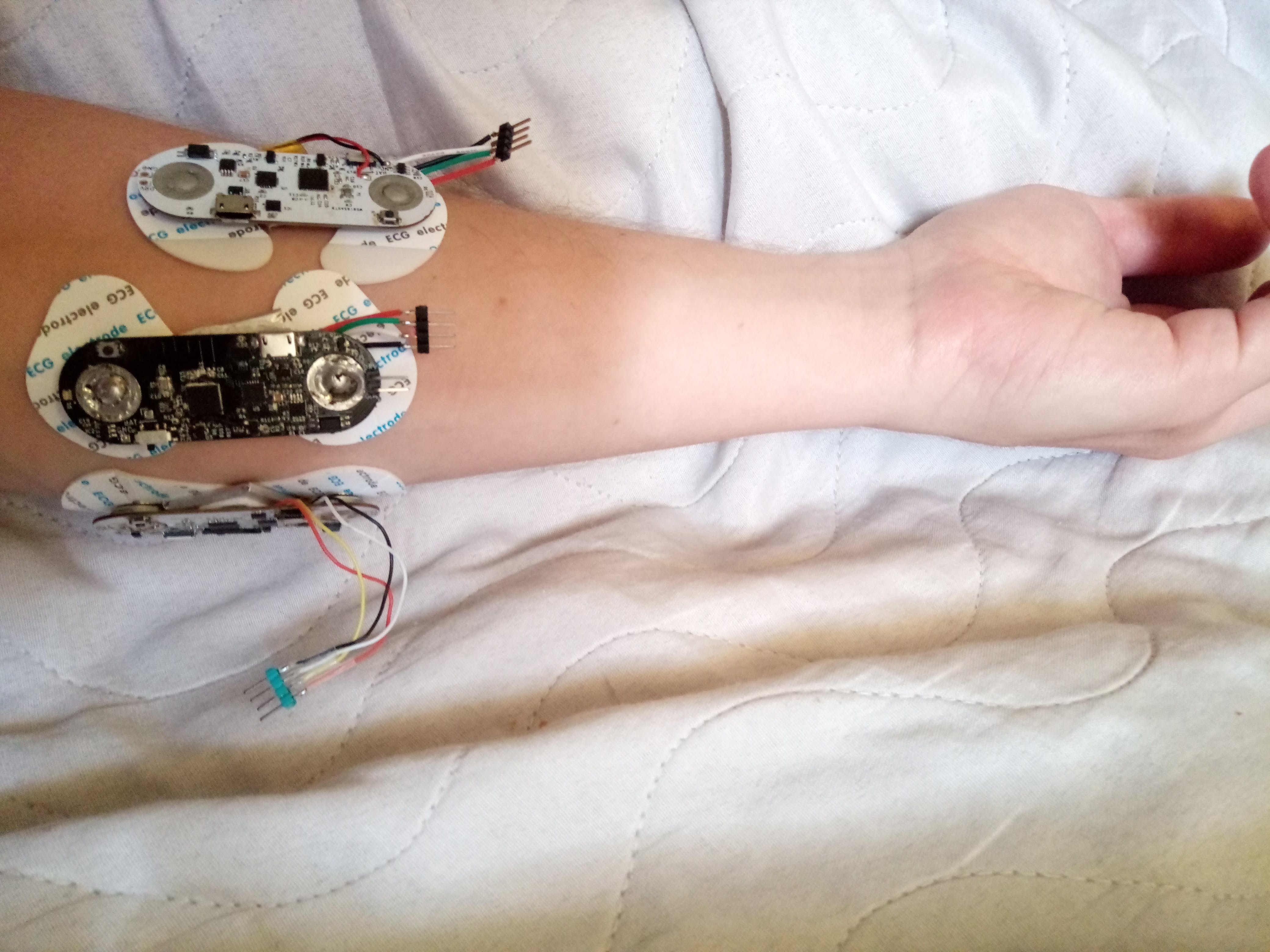
这可能违反直觉,但拇指肌肉信号在手臂的另一侧更明显,因此将其中一个传感器放置在那里,并且所有传感器都放置在靠近肘部的位置(肌肉的大部分身体都在那个区域,但是您想检查您的确切位置-个体差异很大)
4. 代码
在运行主程序之前,您需要找出特定 uECG 设备的单元 ID(通过取消注释第 101 行并逐个打开设备来完成)并将它们填充到 unit_ids 数组中(第 37 行)。
#include 24 .h>
#include 01 .h>
#include
5. 结果
通过一些大约 2 小时的实验,我能够获得相当可靠的运行(视频显示了一个典型案例):
它的行为并不完美,通过这种处理只能识别张开和闭合的手指(甚至不能识别 5 个手指中的每一个,它只检测到 3 个肌肉群:拇指、食指和中指,无名指和小指)。但是分析信号的“AI”在这里需要 3 行代码,并使用来自每个通道的单个值。我相信可以通过在 PC 或智能手机上分析 32-bin 光谱图像来完成更多工作。此外,此版本仅使用 3 个uECG设备(EMG 通道)。有了更多的通道,应该可以识别真正复杂的模式——但是,这就是项目的重点,为任何有兴趣的人提供一些起点:) 手控绝对不是这种系统的唯一应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






