
资料下载


×
永磁同步电机伺服系统抗扰动自适应控制
消耗积分:0 |
格式:pdf |
大小:1.62 MB |
2011-08-15
分享资料个
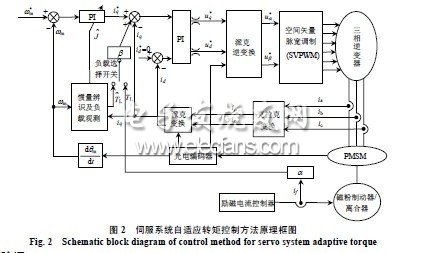
为使永磁同步电机(permanent magnet synchronousmotor,PMSM)伺服系统能够满足某些驱动场合时变惯量、时变负荷的工作特性,提出一种具有抗扰动作用的自适应转矩控制方法。针对时变惯量,采用朗道离散时间递推算法对惯量进行实时估计,然后用辨识得到的惯量当前值依照规则对速度控制器各参数进行整定,使伺服系统在惯量发生变化时仍具有良好的动静态性能。针对时变负荷,采用一种简单的降维负载观测器对负载力矩进行辨识,并用辨识得到的负载力矩值对变载引起的速度扰动进行自适应补偿,以提高系统的鲁棒性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



