
资料下载


×
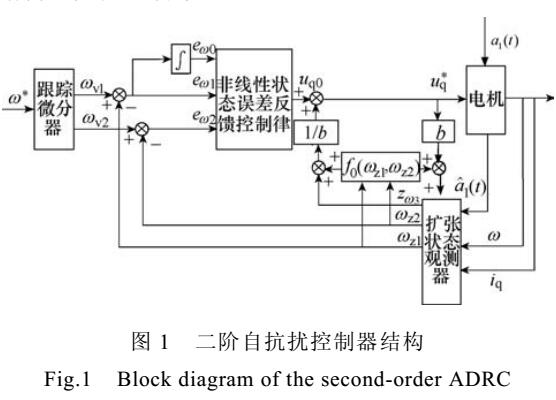
永磁电机驱动系统自抗扰控制
消耗积分:1 |
格式:rar |
大小:0.42 MB |
2018-03-22
分享资料个
针对永磁同步电机( PMSM)的车辆驱动系统在负载变化过程中转速受到较大影响的问题,结合自抗扰控制器( ADRC),采用对负载扰动进行观测并补偿来抑制外部扰动的方法,设计了基于负载观测的二阶ADRC速度控制系统。对负载观测ADRC的控制方程进行了推导,并将负载观测控制量作为速度环的补偿控制输入。同时与未加入负载扰动的ADRC系统作对比研究。仿真与实验结果表明,带有负载观测的ADRC调速系统具有更强的抗扰动能力,提高了PMSM变频调速系统的动态稳定性能和响应能力,证明了带有负载观测的ADRC控制系统能够更好地满足电传动履带车辆的控制系统要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 h1654155977.6620
2022-08-23
0 回复 举报http://house.china.com.cn/sousou/%25BC%25AF%25CD%25C5%252C%2B%25B0%25EB%25C9%25BD%25D3%25E9%25C0%25D6%25D3%25E9%25C0%25D6%25B3%25C7B2024.cN%252C%25CF%25C3%25C3%25C5%25C8%25C8%25C3%25C5_2s.htm http://house.china.com.cn/sousou/VIP%252C%2B%25B9%25FB%25B8%25D2%25C1%25FA%25CC%25DA%25B9%25AB%25CB%25BEB2024.cN%252C%25D3%25F1%25C1%25D6%25B5%25E7%25CA%25D3%25CC%25A8_2s.htm http://house.china.com.cn/sousou/%25B4%25FA%25C0%25ED%252C%2B%25C3%25E5%25B5%25E9%25B2%25FD%25CA%25A2%25B9%25FA%25BC%25CA%25BC%25AF%25CD%25C5B2024.cN_27s.htm http://house.china.com.cn/sousou/%25B4%25FA%25C0%25ED%252C%2B%25B9%25FB%25B8%25D2%25D3%25C0%25F6%25CE%25B9%25FA%25BC%25CA%25BC%25AF%25CD%25C5B2024.cN%252C%25B9%25F0%25C1%25D6%25D5%25D0%25C6%25B8_1s.htm http://house.china.com.cn/sousou/%25BC%25AF%25CD%25C5%252C%2B%25B9%25FB%25B8%25D2%25C1%25FA%25CC%25DA%25BC%25AF%25CD%25C5%25D3%25E9%25C0%25D6B2024.cN%252C%25D2%25C1%25B4%25BA%25CD%25F8%25CD%25A8_2s.htm 收起回复
h1654155977.6620
2022-08-23
0 回复 举报http://house.china.com.cn/sousou/%25BC%25AF%25CD%25C5%252C%2B%25B0%25EB%25C9%25BD%25D3%25E9%25C0%25D6%25D3%25E9%25C0%25D6%25B3%25C7B2024.cN%252C%25CF%25C3%25C3%25C5%25C8%25C8%25C3%25C5_2s.htm http://house.china.com.cn/sousou/VIP%252C%2B%25B9%25FB%25B8%25D2%25C1%25FA%25CC%25DA%25B9%25AB%25CB%25BEB2024.cN%252C%25D3%25F1%25C1%25D6%25B5%25E7%25CA%25D3%25CC%25A8_2s.htm http://house.china.com.cn/sousou/%25B4%25FA%25C0%25ED%252C%2B%25C3%25E5%25B5%25E9%25B2%25FD%25CA%25A2%25B9%25FA%25BC%25CA%25BC%25AF%25CD%25C5B2024.cN_27s.htm http://house.china.com.cn/sousou/%25B4%25FA%25C0%25ED%252C%2B%25B9%25FB%25B8%25D2%25D3%25C0%25F6%25CE%25B9%25FA%25BC%25CA%25BC%25AF%25CD%25C5B2024.cN%252C%25B9%25F0%25C1%25D6%25D5%25D0%25C6%25B8_1s.htm http://house.china.com.cn/sousou/%25BC%25AF%25CD%25C5%252C%2B%25B9%25FB%25B8%25D2%25C1%25FA%25CC%25DA%25BC%25AF%25CD%25C5%25D3%25E9%25C0%25D6B2024.cN%252C%25D2%25C1%25B4%25BA%25CD%25F8%25CD%25A8_2s.htm 收起回复
- 相关下载
- 相关文章



