
资料下载


物联网遥控车开源分享
golabs
分享资料个
描述
该项目是为北卡罗来纳大学夏洛特分校的仪器课程创建的。这个项目的目标是设计和实施一个物联网项目来解决问题或提供服务。我们必须使用 2 个粒子光子,它们之间必须具有双向、双向通信。在研究了不同的想法之后,我们决定用 2 个粒子光子制造一个物联网控制的遥控车。第一个光子将在 BLynk 应用程序的帮助下实际控制汽车。第二个光子将从第一个光子获取信号并触发位于遥控车上的转向信号。
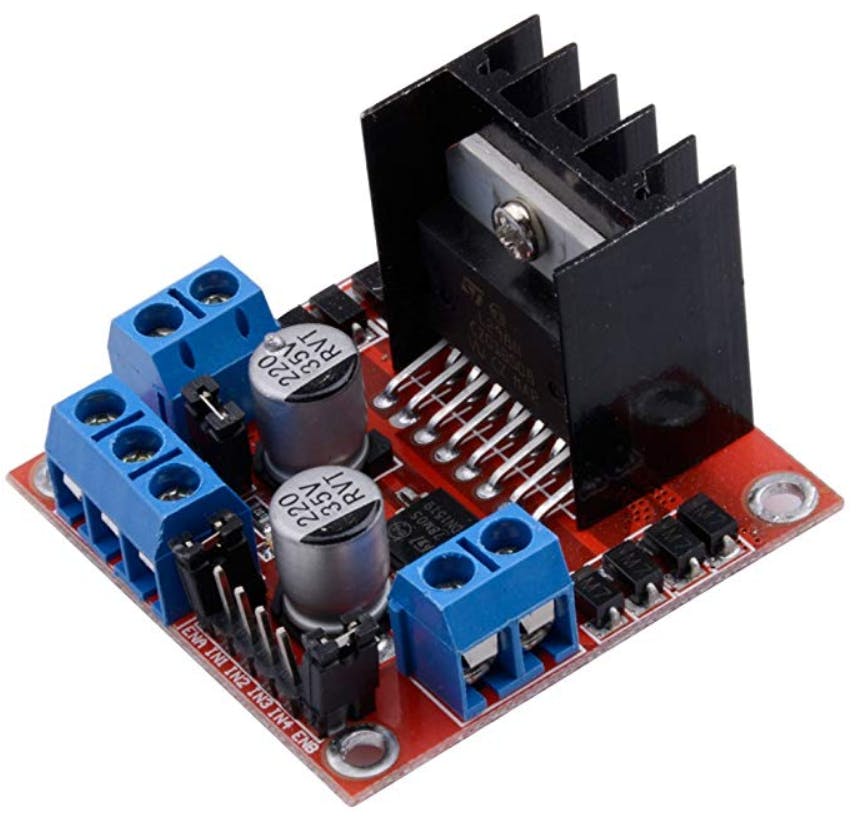
为了开始这个项目,我们必须购买便宜但坚固的遥控车和直流步进电机控制器。对于遥控车,我们订购了一辆 1/18 比例、2.4G 无线电遥控车,四轮驱动,最高时速为 25 公里/小时。我们最终使用的直流电机控制器是 L298N。该电机控制器具有双通道 H 桥驱动器工作模式,可创造更高的工作效率。此外,L298N 可以驱动一台 2 相步进电机、一台 4 相步进电机或两台直流电机。所有的零件都到齐后,我们就开始拆车了。
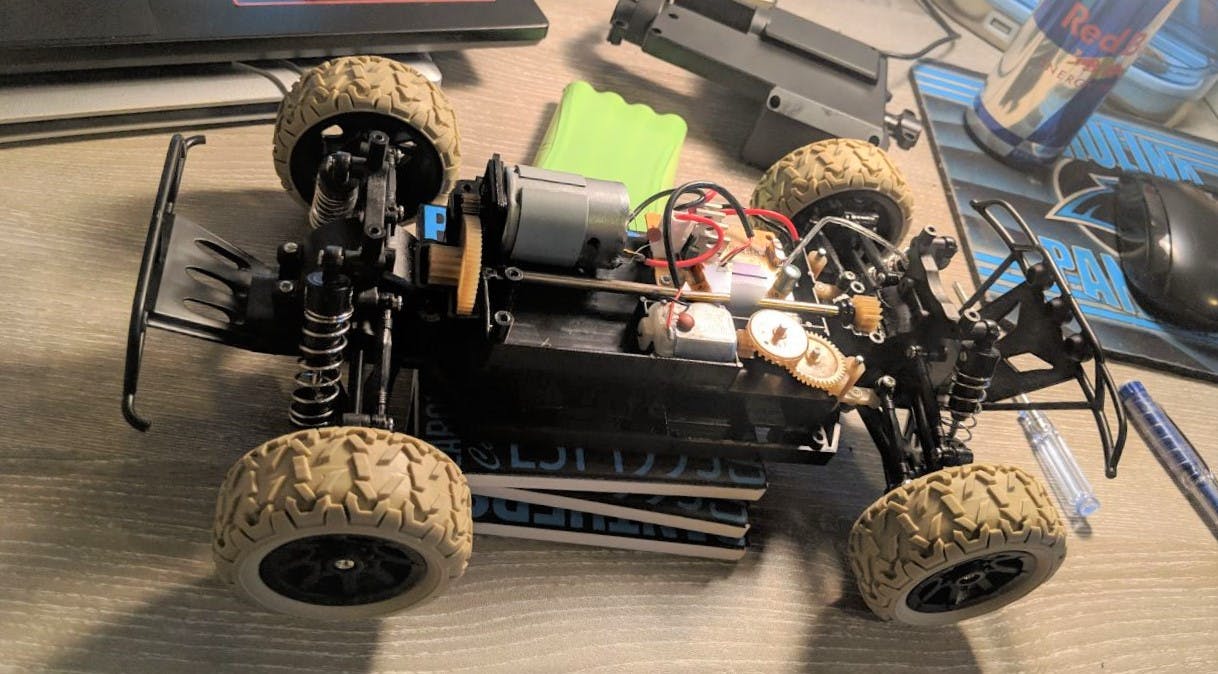
塑料盖下面是 2 个直流电机,一个较小的用于转向,另一个较大的用于前进和后退。这辆车是全时四轮驱动的。这辆车最初是由一个带天线的小板控制的。每个电机有两根电线(地线和电源线)进入电路板,还有来自电池的电源线和地线。汽车用 9.6V Ni-Cd 电池供电,带有 ON/OFF 开关切断电路板的电源,如下所示。

在检查了汽车的心脏并查看是什么让它工作后,电线从电源开关、转向电机和驱动电机开始运行。然后用 3/16" 钻头在塑料外壳上钻 6 个孔,并在孔上贴上标签。这将帮助我了解哪些电线去了哪里。电线穿过孔后,塑料外壳被拧回。
使用双面胶带将 L298N 放置在驱动电机旁边的塑料外壳顶部。然后驱动电机线连接到电机控制器的输出 1,转向电机连接到输出 2。此外,开关电源线连接到电机控制器正面的 12V 输入。电源线和地线也从电机控制器连接到光子。然后 4 根母线/公线从电机控制器上的控制引脚连接到第一个光子。IN1 进入光子上的 D1,IN2 进入 D2。然后 IN3 转到 D4,IN4 转到光子上的 D5。
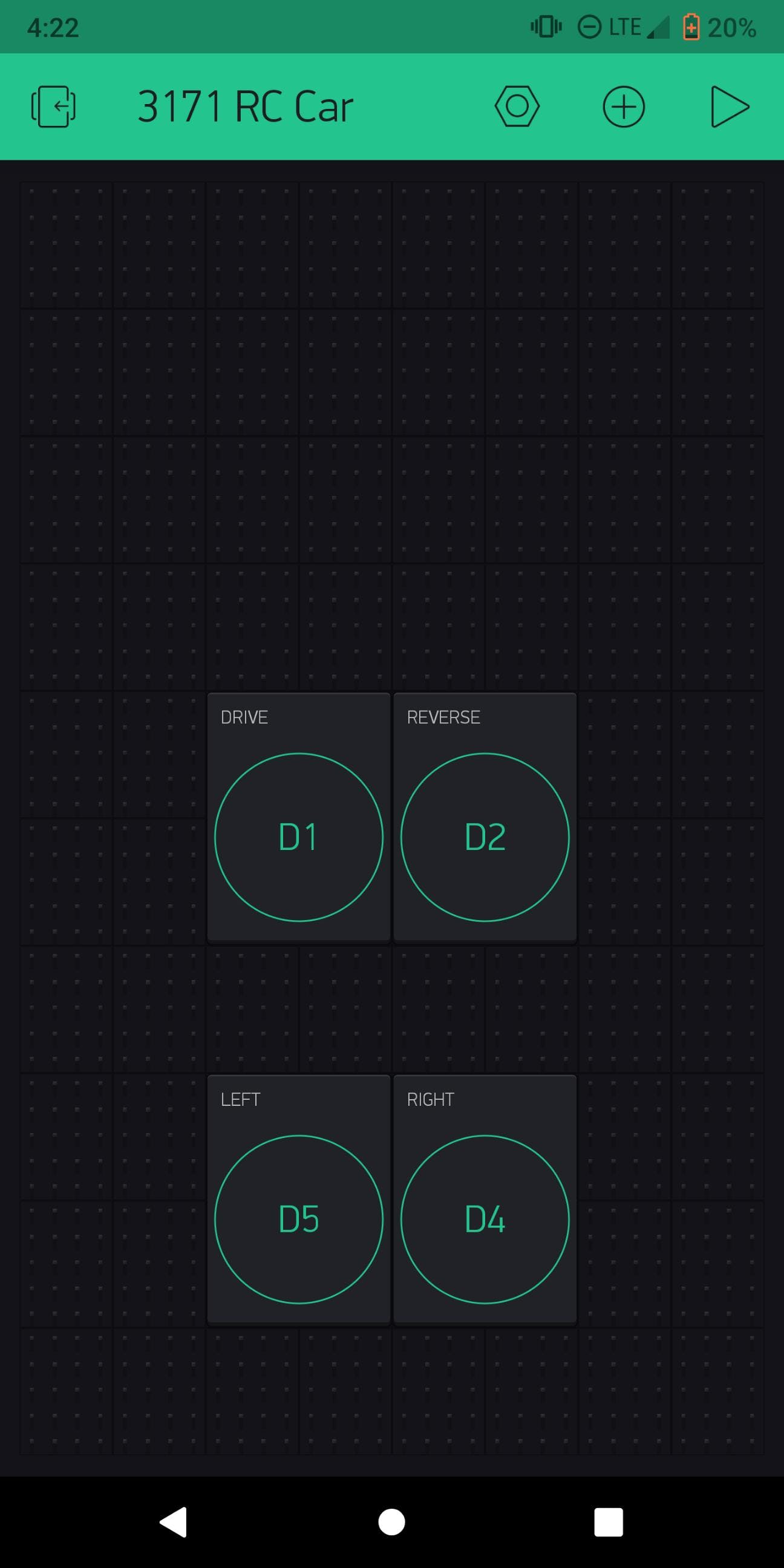
所有这些都完成后,是时候设置 Blynk 应用程序来控制汽车了。下载应用程序并创建帐户后,它会为您提供身份验证令牌。然后您可以通过放置 4 个按钮开始创建应用程序。第一个按钮将控制汽车前进,输出将是 D1。第二个按钮将用于反转,输出为 D2。第三个按钮将用于右转,输出为 D4。最后一个按钮将用于左转,输出为 D5。
现在汽车又可以正常运行了,是时候添加另一个光子了。2 个光子必须进行双向通信。这是使用发布和订阅功能完成的。最终,这是一个 Photon 发布到粒子云的消息,然后另一个 Photon 侦听此消息,并在听到后执行任务。
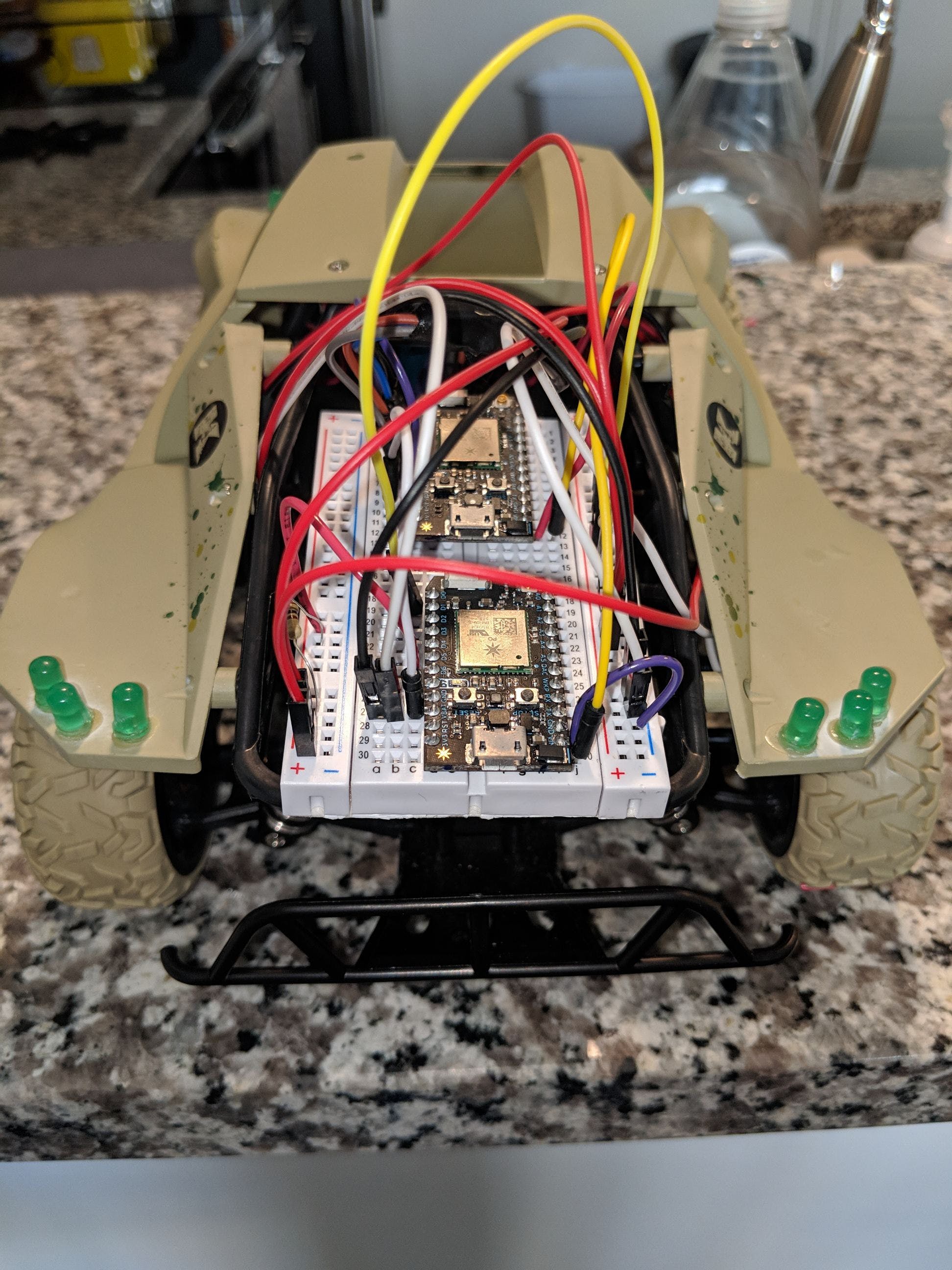
第二个光子被放置在第一个光子的正后方,在同一个面包板上。 第一步是在汽车的每个角上钻 3 个孔。然后在所有 LED 的底部添加强力胶并将它们放入孔中。LED底部有两条腿,较长的一条是正极,较短的一条是地线。然后在每个 LED 腿上焊接电线。这 6 根电线在每个角处拉在一起并焊接到一根电线上。因此,汽车的每一侧将只有 4 根正极和 4 根负极线来控制转向灯,以简化布线。
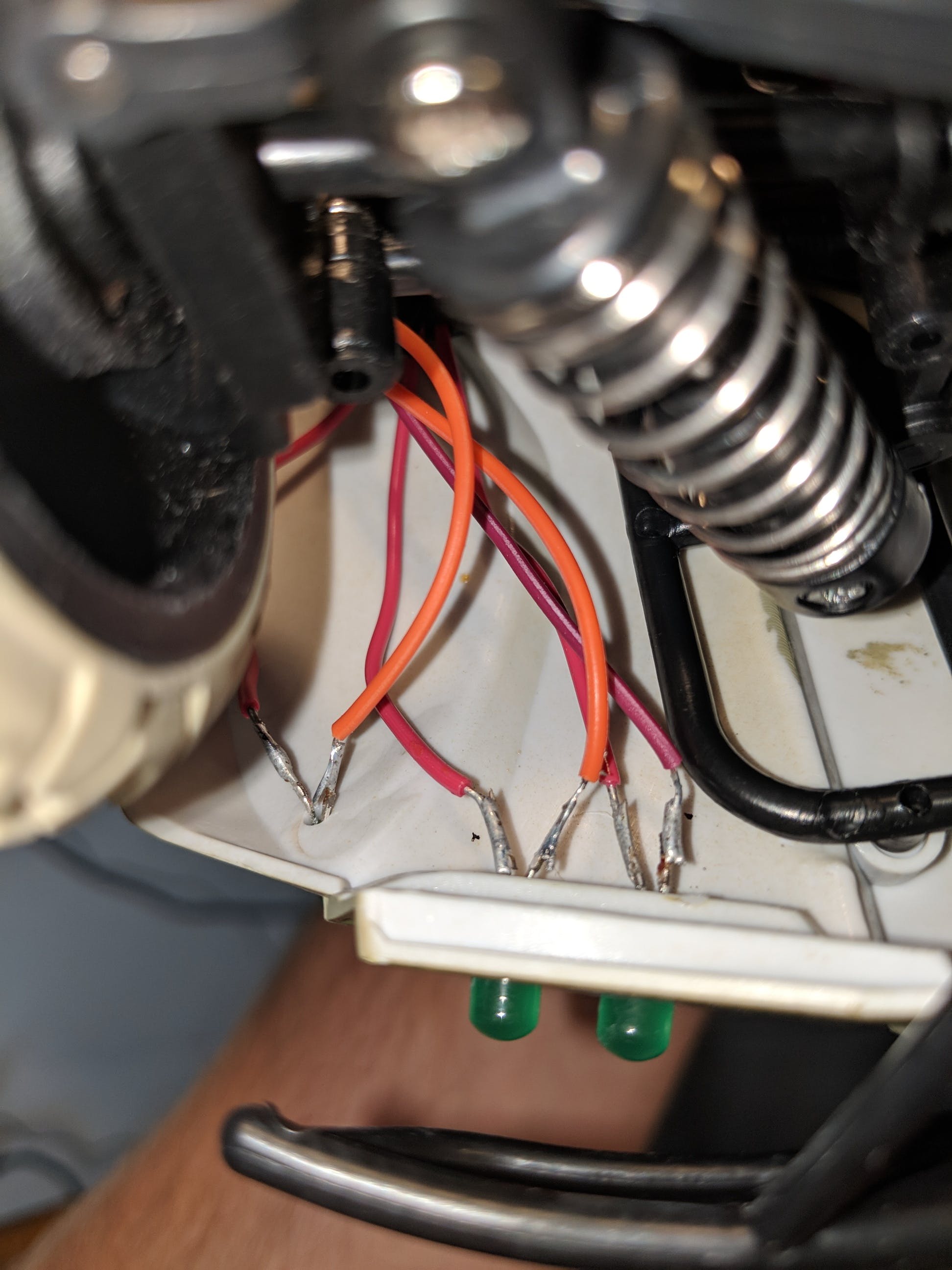
这 4 组电线连接到第二个 Photon。左侧正极导线连接到引脚 D0,右侧正极导线连接到引脚 D6。所有负极线都连接到第二个光子上的接地引脚。在 D0 和 D6 引脚前面放置了 100 欧姆电阻以保护 LED。连接 2 个光子的唯一电线是地线和电源线。

在 2 个光子上闪烁的两个代码在下面的代码部分。
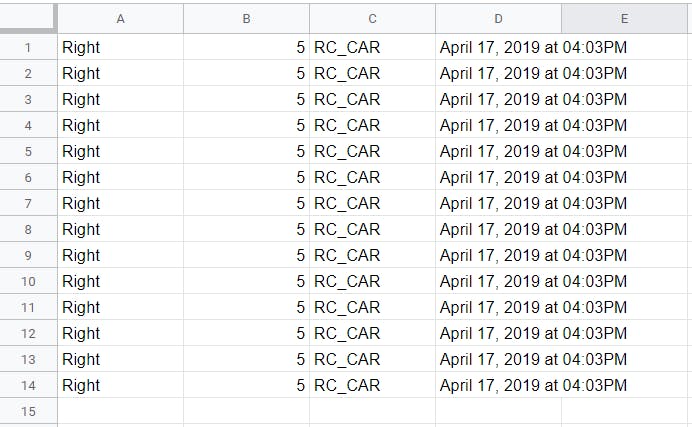
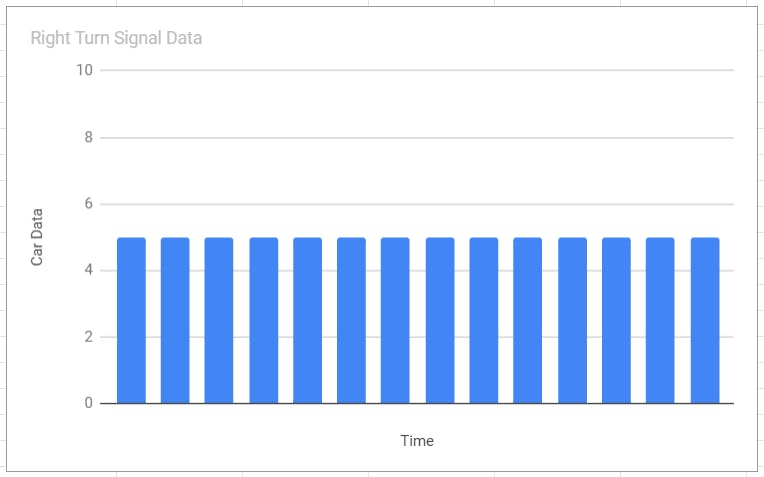
该项目的最后一部分是绘制实时图表。我们最终绘制了右转信号与时间的关系图。我们的图表有点毫无意义,因为我们没有为这个特定项目收集的真实数据。
。我之所以拿着它,是因为电池电量越来越弱,不允许第二个光子连接到互联网。因此,必须将互联网硬连接到光子。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






