
资料下载


使用Android和Arduino进行遥控车破解
陈文博
分享资料个
描述
介绍
好吧,在这个项目中,我们将改造一辆旧的遥控遥控车,并使其成为 Android 控制的。
除此之外,我们将建造一个喇叭,这将大大改善使用伺服电机的转向。便宜的遥控车没有平稳的转向,它们通常有一个可以向左或向右转动的马达,而且很难控制。
概念:
- 控制伺服电机
-
用一个
H-bridge
- 蓝牙通讯
- 使用分压器测量大于 5V的电压
- PWM (脉冲调制)技术
如果您浏览上面的链接,您会发现这些东西如何工作的详细解释。
这是一个高级教程,我认为它是为有一些编程经验的人准备的,他们想尝试一些有趣的东西,并通过实践学习一些电子学。您需要的技能:
- 修补:我们将使用 dremel 工具和螺丝刀、剪线钳等拆除旧车
- 基本电子材料:我们将使用 arduino nano 和一些焊接组件创建一个小板,然后将它们连接到汽车组件
- arduino 编程:使用 Arduino IDE 和 FTDI 适配器将代码上传到 Arduino 板,对代码进行小幅调整
- 构建 Android 应用程序:我们将从 Bitbucket 获取代码,构建应用程序并将其上传到移动设备
第一步:拆旧车,安装伺服电机
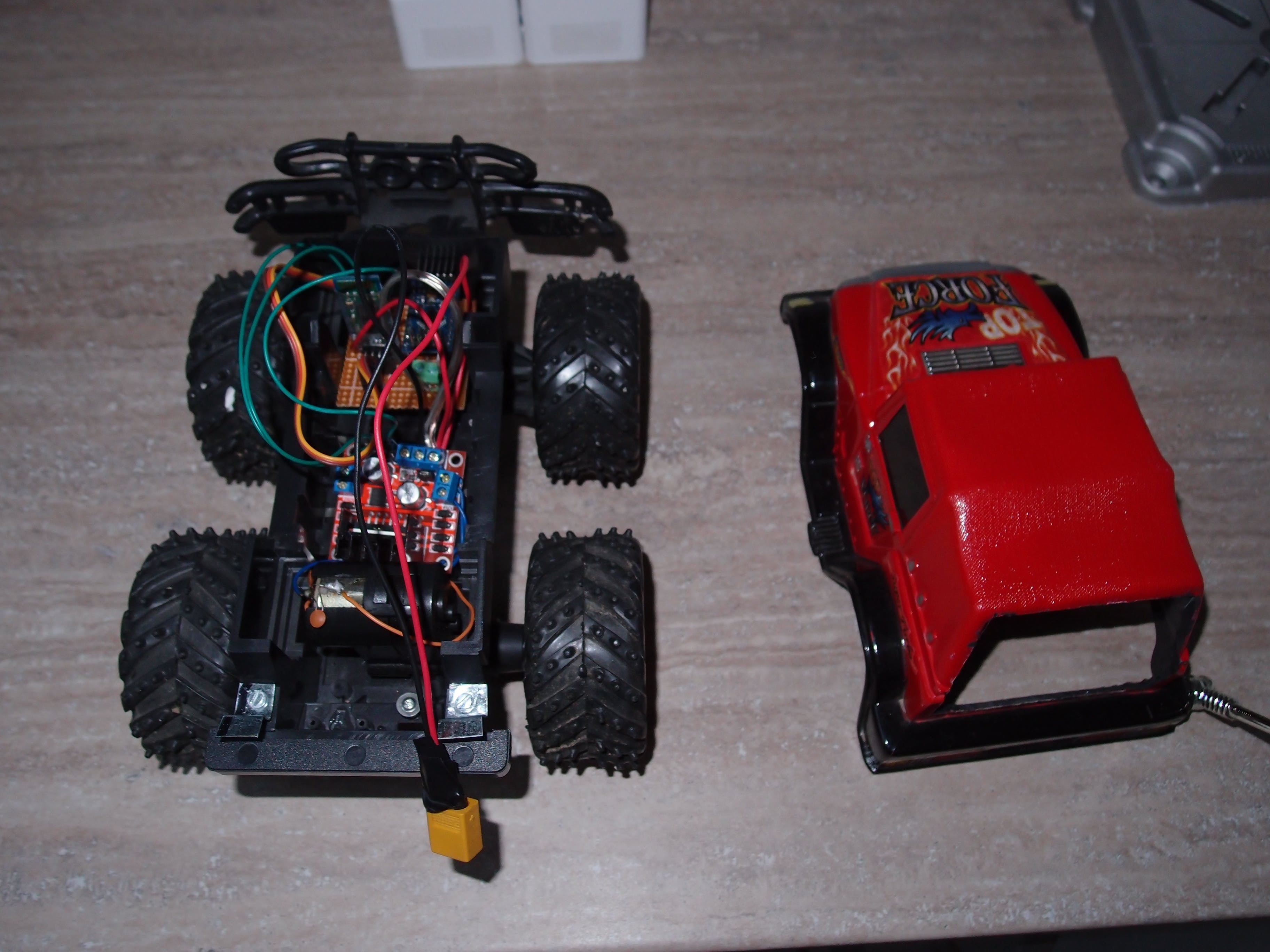
我们将选择遥控车并将其拆毁,进行调整等。我在下面附上了一些图片供您查看整个过程。
首先我们将拆卸汽车,然后我们将从内部电子设备和无用的隔间(如电池座和旧转向)中移除
当我们这样做时,我们必须注意的想法:
- 我们在车内有足够的空间来安装我们的电路板,包括电子元件、伺服器、H 桥和 LiPo 2S 电池
- 可以安装伺服电机,它可以适应驱动汽车旧转向(如果你看图片,你会看到我是如何在特定型号的汽车上实现这一点的)
- 我们不会损坏汽车结构、转向和/或动力传动系统

其次,我们安装伺服电机(见图)。
第二步:搭建电子板,安装到车上
电子板将成为汽车的大脑,它将通过蓝牙监听 Android 应用程序,并控制汽车内置电机、伺服电机、转向和喇叭。
我附上了一个fritzing原理图,这样事情会更容易。定制 PCB 将包含 Arduino pro mini、一个 HC-05 蓝牙模块、几个用于分压器的电阻器、一个压电蜂鸣器和一个 l7805cv 5V 稳压器。
PCB 还将具有各种连接器和电线,以便于插入。我们的电路板将连接到电源、通过 H 桥连接到汽车旧电动机以及伺服电机。此外,蓝牙和 Arduino pro mini 将具有由公母 PCB 连接器制成的定制连接器。
我们的 PCB 上存在来自两个相同电阻的分压器,因此它将电压降低到 5 伏以下,以便我们的模拟引脚进行测量。测量结果将发送到 Android 应用程序并显示在屏幕上。
汽车电源将是至少 1000 mAh 的 2 节锂聚合物电池。电池将通过PWM直接驱动汽车电机。其余的电子设备将由相同的电池供电,但使用 l7805cv 5V 稳压器。
第三步:在Arduino上上传代码,在Android上构建应用
代码(在此处获取)需要使用 USB 到串行 FTDI 适配器 FT232RL 上传到 Arduino pro mini。
您需要将 GND、VCC、Rx、Tx 和 DTR 引脚连接到 Arduino pro mini。然后打开 Arduino 软件选择工具/端口和您正在使用的任何端口。然后是工具/板/Arduino Pro 或 Pro Mini。然后是工具/板/处理器/ATmega328(5V 16Mhz)。
最后,打开草图并按上传。
那么这个程序是如何工作的:首先它侦听串行线(辅助软件串行)以获取传入传输。该消息被解析并解释为喇叭命令或电机命令(包含速度和方向)。消息被解释后,命令被传输到电机/喇叭。草图还定期轮询 A3 模拟引脚以找出电池电压,并将通过蓝牙传输数据。
接下来是克隆 Android 应用程序存储库并使用 Android Studio 构建它。Bitbucket 网址是:https ://bitbucket.org/danionescu/remotecontrollbluetoothrobot
对于 Android Studio 部分,有很多教程,例如:
https://www.instructables.com/id/How-To-Create-An-Android-App-With-Android-Studio/
步骤是:
- 下载并配置Android Studio
- 让手机进入开发模式
- 将源代码导入 Android Studio
- 构建和安装应用程序
Android Studio 的一些替代品是InteliJ或Eclipse。
第四步:排除汽车故障并运行应用程序
安装安卓应用程序后,首先要做的是使用安卓配对您的蓝牙设备。这将涉及以下步骤:
- 打开你的车
- 转到Android菜单/蓝牙
- 扫描蓝牙设备
- 选择您的设备并配对(出现提示时输入代码)。
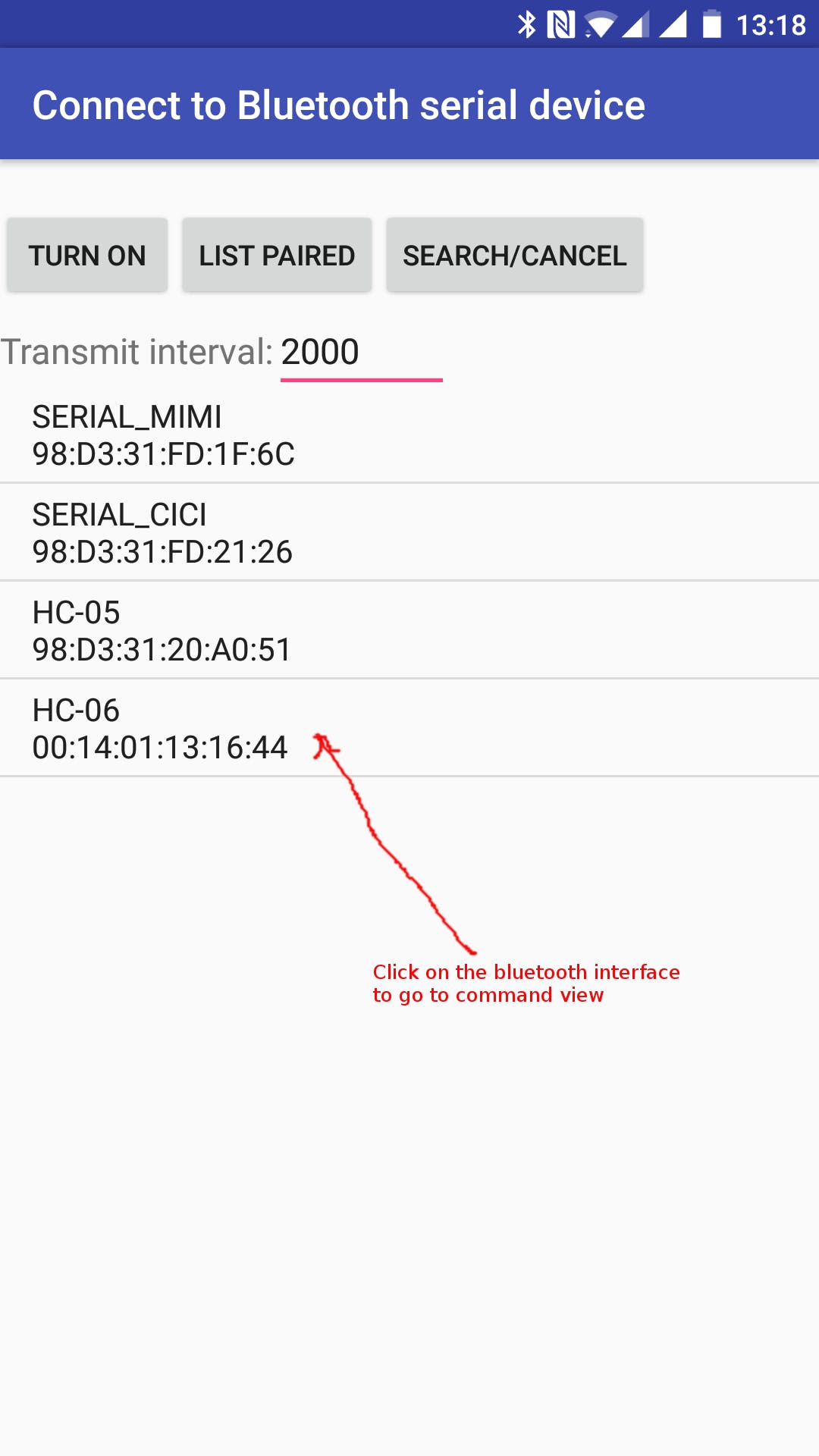
好的。之后打开 Android 应用程序,单击“列出已配对”按钮,从列表中单击相应的蓝牙设备,将显示下一个屏幕。
下一个屏幕将实际控制汽车。使用顶部的水平滑块,您可以控制车轮的角度,并使用底部的垂直滑块控制速度和方向。启动/停止汽车还有一个“开/关”按钮,“Custom1”按钮是汽车喇叭。“custom1”按钮下方是一个带有电池电压的小文本。
调整:
- 如果汽车后退而不是前退,反之亦然,将引脚 A0 和 A1 倒转
- 如果您想修改最大/最小角度或反向角度,请调整此代码:
void adjustDirection(int direction)
{
int newDirection = steeringMiddlePoint + map(direction, 0, 100, -35, 25);
Serial.println(newDirection);
steering.write(newDirection);
delay(15);
}
我希望你在这个项目中学到了一些东西,如果你喜欢这个想法,你可以用一个定制的机器人和一个更高级的 Android 应用程序来检查这个更高级的项目。:)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






