
资料下载


×
循迹小车
消耗积分:2 |
格式:doc |
大小:6274KB |
2014-08-07
杨子涵
分享资料个
智能循迹小车的制作过程及图示,代码等
1.系统概述
智能小车系统由红外循迹模块、电机驱动模块、简易控制模块和电源驱动模块组成。通过红外线发射接收系统对地板的黑线进行循迹,并将偏离黑线的信号发送到单片机系统,经过“大脑”的反应,发出信号控制电机驱动模块和电源驱动模块,使双电机驱动的智能小车能够进行线路识别,进而实现小车的智能化。
各功能块的组成和功能介绍:
(1)红外循迹模块
在智能机器人小车的设计中使用的是一体反射式红外对管,所谓一体就是发射管和接受管固定在一起,反射式的工作原理就是接收管接收到的信号是发射管发出的红外光经过反射物的反射后得到的,所以使用红外对管进行循迹时必须是白色地板加黑色引导条。下图为红外循迹电路的原理图。
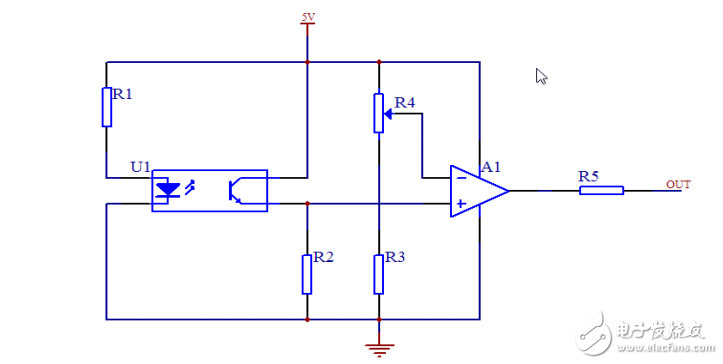
上面电路由一组红外对管、电位器、运算放大器和电阻组成的,R1起到限流的作用,用来控制反光管发出红外信号的强弱。接收管实际上是一个光敏三极管,基极的光电流经过放大后流经电阻R2产生电压与电位器调节后得到的电压进行比较。A1与电阻组成一个比较器。在有红外信号返回时OUT端输出高电平,反之输出低电平。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





