
资料下载


×
基于神经网络的PID控制器
消耗积分:2 |
格式:pdf |
大小:300KB |
2017-05-24
牛伟嘉
分享资料个
神经网络
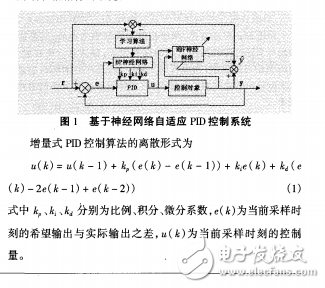
1 引言肿控制具有较强的鲁棒性,结构简单,对模型依赖程度小等优点。广泛应用于工业过程中。但是,参数的整定及在线自适应调整都是常规PD控制器难以解决的问题[1]。针对上述情况,本文设计了一种新型的神经网络PⅢ控制器,该控制器的主要特点是它有两个子神经网络,一个是RBF辨识网络,用于求对象的灵敏度信息;另一个是BP网络,实现PⅢ参数能够在线调整。 2控制系统结构图基于神经网络自适应PⅢ控制系统的结构如图1所示。控制器由3个部分组成:(1)经典PⅢ控制器,直接对被控对象过程进行闭环控制,其3个参数k、七。、k在线整定。(2)RBF辩收稿日期:2008一12一04 16 Techn呻s 0f AI J10|僧Ⅱ0n&却pl吼№ 识网络,用于建立被控系统的辩识模型,以便动态地观测控制对象的输出对控制输入的灵敏度,提供给BP神经网络。(3)BP神经网络,通过调整自身权系数,对PID控制参数进行调节,以达到某种性能指标的最优。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




