
资料下载


×
基于Cortex_M4内核微处理器的新型智能小车设计与实现
消耗积分:0 |
格式:rar |
大小:0.15 MB |
2017-09-25
分享资料个
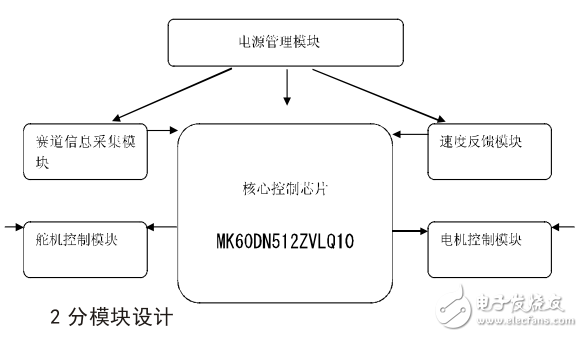
本文以MK60DN512ZVLQ10芯片为核心,开发出智能车运行 的软硬件资源,结合自主设计的电源模块、路径识别模块、摇 头控制模块转向控制模块、速度控制模块,在飞思卡尔智能车 竞赛新型跑道上稳定行驶。为改变规则后的2012年智能车竞赛 提供了完美的解决方案。 1 总体方案设计 本方案控制芯片选择为飞思卡尔32位Kinetis系列中功能最全的MK60DN512ZVLQ10,从激光传感器获知当前赛道信息,经微处理器处理得到摇头舵机偏转值、转向舵机偏转值,输出到舵机执行,完成摇头转向配合循线。同时根据赛道情况及编码器反馈控制电机转速。智能车硬件系统框图
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



