
资料下载


详解机器人的伺服系统
分享资料个
伺服系统的结构组成
机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
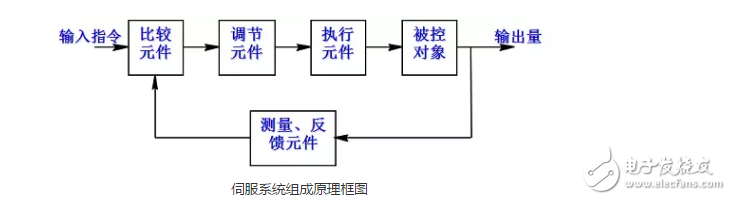
伺服系统组成原理框图
1.比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
2.控制器
控制器通常是计算机或PID(比例、积分和微分)控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3.执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4.被控对象
被控对象指被控制的物件,例如一个机械手 臂,或是一个机械工作平台。
5.检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
伺服系统的特点和功用
伺服系统与一般机床的进给系统有本质上差别,它能根据指令信号精确地控制执行部件的运动速度与位置。伺服系统是数控装置和机床的联系环节,是数控系统的重要组成,具有以下特点:
必须具备高精度的传感器,能准确地给出输出量的电信号。
功率放大器以及控制系统都必须是可逆的。
足够大的调速范围及足够强的低速带载性能。
快速的响应能力和较强的抗干扰能力。
伺服系统的类型
按控制原理分:有开环、闭环和半闭环三种形式
按被控制量性质分: 有位移、速度、力和力矩等伺服系统形式
按驱动方式分: 有电气、液压和气压等伺服驱动形式
按执行元件分: 有步进电机伺服、直流电机伺服和交流电机伺服形式
伺服系统的执行元件
1.执行元件的种类及其特点
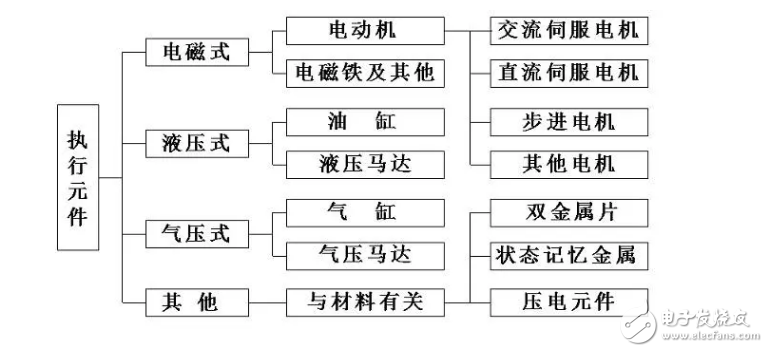
电气式执行元件
电气执行元件包括直流(DC)伺服电机、交流(AC)伺服电机、步进电机以及电磁铁等,是最常用的执行元件。对伺服电机除了要求运转平稳以外,一般还要求动态性能好,适合于频繁使用,便于维修等。
液压式执行元件
液压式执行元件主要包括往复运动油缸、回转油缸、液压马达等,其中油缸最为常见。在同等输出功率的情况下,液压元件具有重量轻、快速性好等特点。
气压式执行元件
气压式执行元件除了用压缩空气作工作介质外,与液压式执行元件没有区别。气压驱动虽可得到较大的驱动力、行程和速度,但由于空气粘性差,具有可压缩性,故不能在定位精度要求较高的场合使用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






