
资料下载


超声波避障技术在智能扫地机器人中的应用
分享资料个
基于超声波避障技术是建立在获取机器人前方障碍物的距离和位置信息上,故超声波避障技术主要运用超声波传感器,根据超声波测距原理,结合矩阵式结构设计理念的数据融合对机器人前方障碍物的距离和位置进行定位。
超声波测距技术的方法有很多,如相位检测法、声波幅值检测法和渡越时间检测法等。本论文是采用超声测距最常用的方法渡越时间探测法。即在声速已知的情况下,通过测量超声波回声所经历的时间来获得距离。其原理图如图所示。
为了建立一个智能扫地机器人避障控制系统,重要的是要使智能扫地机器人能做到稳定、连续避障,同时避障算法的制定应根据智能扫地机器人行走系统的速度及反应时间等参数来设计。
深圳世强代理的TDC-GP22芯片可以满足上述设计应用要求,它完全是一个单芯片代理超声波发射与接收的全部电路。AMS公司利用纯数字化CMOS技术生产的时间数字转换器,能将时间间隔的测量量化到22ps的精度,可以说天生就肩负了推动超声波避障技术变革的使命。
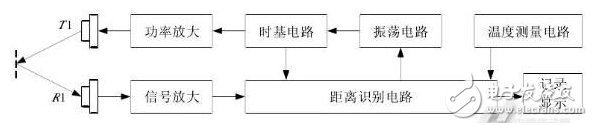
图1:超声波测距原理图
时间数字转换器TDC即为芯片TDC-GP22的技术核心,它利用信号通过逻辑门的绝对时间延迟来精确量化时间间隔。并且这个高精度的时间测量单元TDC,其分辨率达到22ps。
世强代理的TDC-GP22的重要特性还包括:
●温度测量精度(2mkrms);
●TOF飞行时差的温漂(《0.3ps/k);
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






