
资料下载


×
详细分析工业机器人的主要参数
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-10-09
分享资料个
机器人已经成为了我们生活的一部分,但是除了经常能看到机器人的外表以外,我们很少会接触到机器人的“内在”,如果你是一个标准的机器人爱好者,你还应该知道这个——机器人的技术参数。
了解工业机器人的阶段,需要了解其工业机器人的几个因素。尺寸,有效负载能力,重复性,覆盖范围和其他机器人规格在为工业应用选择合适的机器人手臂方面发挥主要作用。
工业机器人技术参数——概念
机器人技术参数是机器人制造商在产品供货时所提供的技术数据。所以不同的机器人,它的技术参数不一样。
工业机器人的主要技术参数一般都有:自由度,定位精度和重复定位精度、工作范围、最大工作速度和承载能力等。
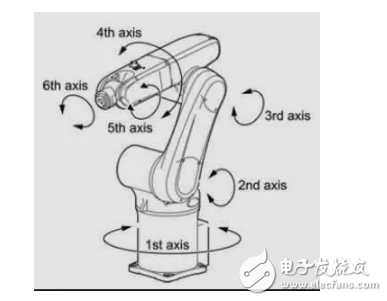
“自由度”
自由度是指机器人所具有的独立坐标轴运动的数目。机器人的自由度是根据它的用途来设计的,在三维空间中描述一个物体的姿态需要六个自由度,机器人的自由度,可以少于六个,也可以多于六个。
大多数机器人从总体上看是个开链机构,但是其中可能包含局部闭环机构,闭环结构可以提高刚性,但是,会限制关节的活动范围,工作空间会缩小。
定位精度和重复定位精度
我们经常说到的机器人的精度是指机器人的定位精度和重复定位精度。
定位精度:机器人手部实际到达位置和目标位置之间的差异。
重复定位精度:机器人重新定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示。
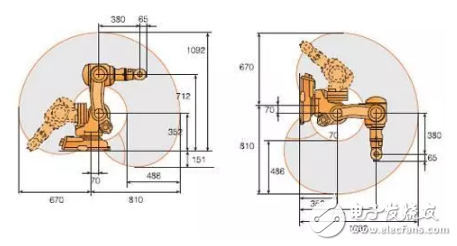
“工作范围”
也就是机器人的工作区域,机器人手臂末端或手腕中心所能到达的所有点的集合。工作范围的形状好和大小是十分重要的,机器人在进行某一个作业的时候,可能会因为存在手部不能到达的作业死区而不能完成任务。
了解工业机器人的阶段,需要了解其工业机器人的几个因素。尺寸,有效负载能力,重复性,覆盖范围和其他机器人规格在为工业应用选择合适的机器人手臂方面发挥主要作用。
工业机器人技术参数——概念
机器人技术参数是机器人制造商在产品供货时所提供的技术数据。所以不同的机器人,它的技术参数不一样。
工业机器人的主要技术参数一般都有:自由度,定位精度和重复定位精度、工作范围、最大工作速度和承载能力等。
“自由度”
自由度是指机器人所具有的独立坐标轴运动的数目。机器人的自由度是根据它的用途来设计的,在三维空间中描述一个物体的姿态需要六个自由度,机器人的自由度,可以少于六个,也可以多于六个。
大多数机器人从总体上看是个开链机构,但是其中可能包含局部闭环机构,闭环结构可以提高刚性,但是,会限制关节的活动范围,工作空间会缩小。
定位精度和重复定位精度
我们经常说到的机器人的精度是指机器人的定位精度和重复定位精度。
定位精度:机器人手部实际到达位置和目标位置之间的差异。
重复定位精度:机器人重新定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示。
“工作范围”
也就是机器人的工作区域,机器人手臂末端或手腕中心所能到达的所有点的集合。工作范围的形状好和大小是十分重要的,机器人在进行某一个作业的时候,可能会因为存在手部不能到达的作业死区而不能完成任务。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






