
资料下载


激光雷达的分类及其在机器人中的应用
分享资料个
2:激光雷达的分类
根据扫描机构的不同,激光测距雷达有2D和3D两种。它们大部分都是靠一个旋转的反射镜将激光发射出去并通过测量发射光和从物体表面反射光之间的时间差来测距。3D激光测距雷达的反射镜还附加一定范围内俯仰以达到面扫描的效果。它们都是直接测距方法。同3D激光测距雷达相比,2D激光测距雷达只在一个平面上扫描,结构简单,测距速度快、系统稳定可靠。目前2D激光测距雷达主要在室内的移动机器人上应用较多,因为在室内的结构化环境下,地面平坦,所有障碍物又都垂直于地面,因此机器人只要能在平行于地面的平面上获取环境信息便己经足够导航的需要。很多室内移动机器人的应用,如环境的地图生成,机器人的自定位,避障等等的研究都是基于2D激光测距雷达的。但是,将2D激光测距雷达用于越野环境下的障碍物检测有相当的难度。由于越野地形复杂,高低不平,由此会引起车体行驶时的剧烈颠簸。而2D激光测距雷达只能是单线扫描,因此不可避免的会引起比较严重的障碍物的漏检和虚报现象。
3:激光雷达测量时间的技术
激光测距雷达测量时间差有三种不同的技术:
(l)脉冲检测法:直接测量反射脉冲与发射脉冲之间的时间差;
(2)相干检测法:通过测量调频连续波的发射光束和反射光束之间的差频而测量时间差;
(3)相移检测法:通过测量调幅连续波,的发射光束和反射光束之间的相位差而测量时间差。由于相位差的2兀周期性,因此这一方法测得的只是相对距离,而非绝对距离,
4:激光雷达在ALV中的用途
在陆地移动机器人的导航中,3D激光测距雷达应用得比较多。在移动机器人中中主要应用在以下三个方面:
(1)路标检测及地图匹配
(2)越野行驶时建立地形图
(3)障碍物检测
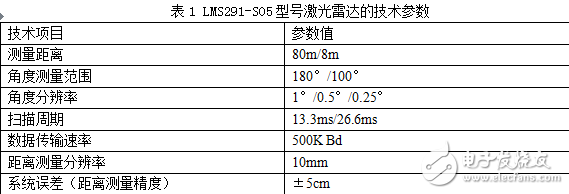
5:举例LMS291-s05型号的激光雷达的特点和参数
以LMS291-S05型号激光雷达为例进行分析,该型号是一种二维的激光雷达,只扫描一个平面的数据,其特点是:(1) 感知距离远,最大可达80米;覆盖角度范围大,最大可达180度;(2) 距离和角度测量精度高,分别可达5厘米和0.1度;(3) 扫描时间短,约为26.6毫秒,可以获得高车速情况下的实时测量;(4) 具有雾校正功能,对环境光线变化不敏感,适用于室外环境。LMS291-S05型号激光雷达详细的技术参数请见表1。其中比较重要的参数包括角度测量范围和角度分辨率、扫描周期、系统误差。角度测量范围和角度分辨率决定了激光雷达得到的数据量;扫描周期是对定位算法实时性的评价标准;系统误差对整个定位过程的精度有很大影响。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




