
资料下载


焊接机器人简介与焊接基础知识的全解析
分享资料个
简要介绍了机器人焊接技术发展历程、应用现状,从焊缝跟踪技术、离线编程与路径规划技术、多机器人协调控制技术、专用弧焊电源技术、焊接机器人系统仿真技术、机器人用焊接工艺方法、遥控焊接技术等七个方面论述了焊接机器人技术的研究现状,并对焊接机器人技术的未来发展趋势做出了展望,其中视觉控制技术、模糊控制技术、神经网络控制及嵌入式控制技术将是焊接机器人智能化技术发展的主要方向。
1.1、 概述焊接方法的分类及特点
目前,在工业生产中应用的焊接方法已达百余种。根据它们的焊接过程特点可将其分为熔焊、压焊和钎焊三大类,每大类又可按不同的方法细分为若干小类,如图所示。
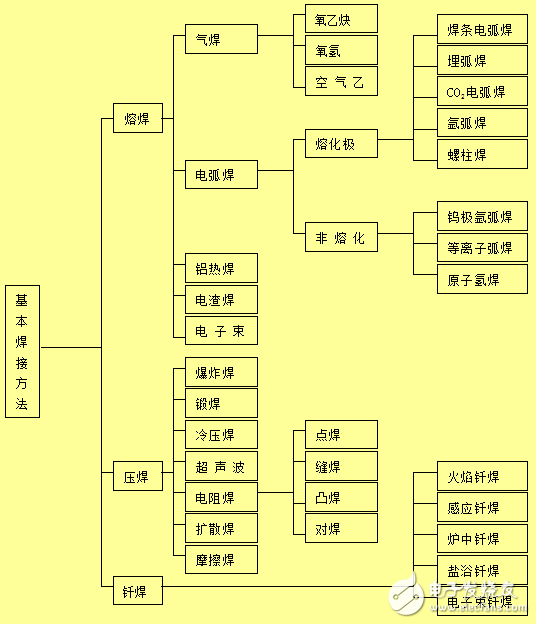
(1)熔焊 将待焊处的母材金属熔化以形成焊缝的焊接方法称为熔焊。实现熔焊的关键是要有一个能量集中、温度足够高的局部热源。若温度不够高,则无法使材料熔化;而能量集中程度不够,则会加大热作用区的范围,徒然增加能量损耗。按所使用热源的不同,熔焊可分为以下一些基本方法:电弧焊(以气体导电时产生的电弧热为热源,以电极是否熔化为特征分为熔化极电弧焊和非熔化极电弧焊两大类)、气焊(以乙炔或其他可燃气体在氧中燃烧的火焰为热源)、铝热焊(以铝热剂的放热反应产生的热为热源)、电渣焊(以熔渣导电时产生的电阻热为热源)、电子束焊(以高速运动的电子流撞击焊件表面所产生的热为热源)、激光焊(以激光束照射到焊件表面而产生的热为热源)等若干种。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






