
资料下载


自动焊接机械臂开源分享
分享资料个
描述
介绍
当我在寻找机械臂的不同能力时,偶然想到了这个项目的想法,然后我发现有几个人涵盖了这个使用领域(自动焊接和焊接机械臂)。
其实我之前也有过建设类似项目的经验,但这次的项目非常有用和有效。
在决定它的形状之前,我看到了很多应用程序和其他项目,尤其是在工业领域,开源项目帮助我找到了合适的形状。
这是因为我们大脑的视觉喂养背后的科学。
第 1 步:设计
起初我看到很多专业项目因为太复杂而无法实施。
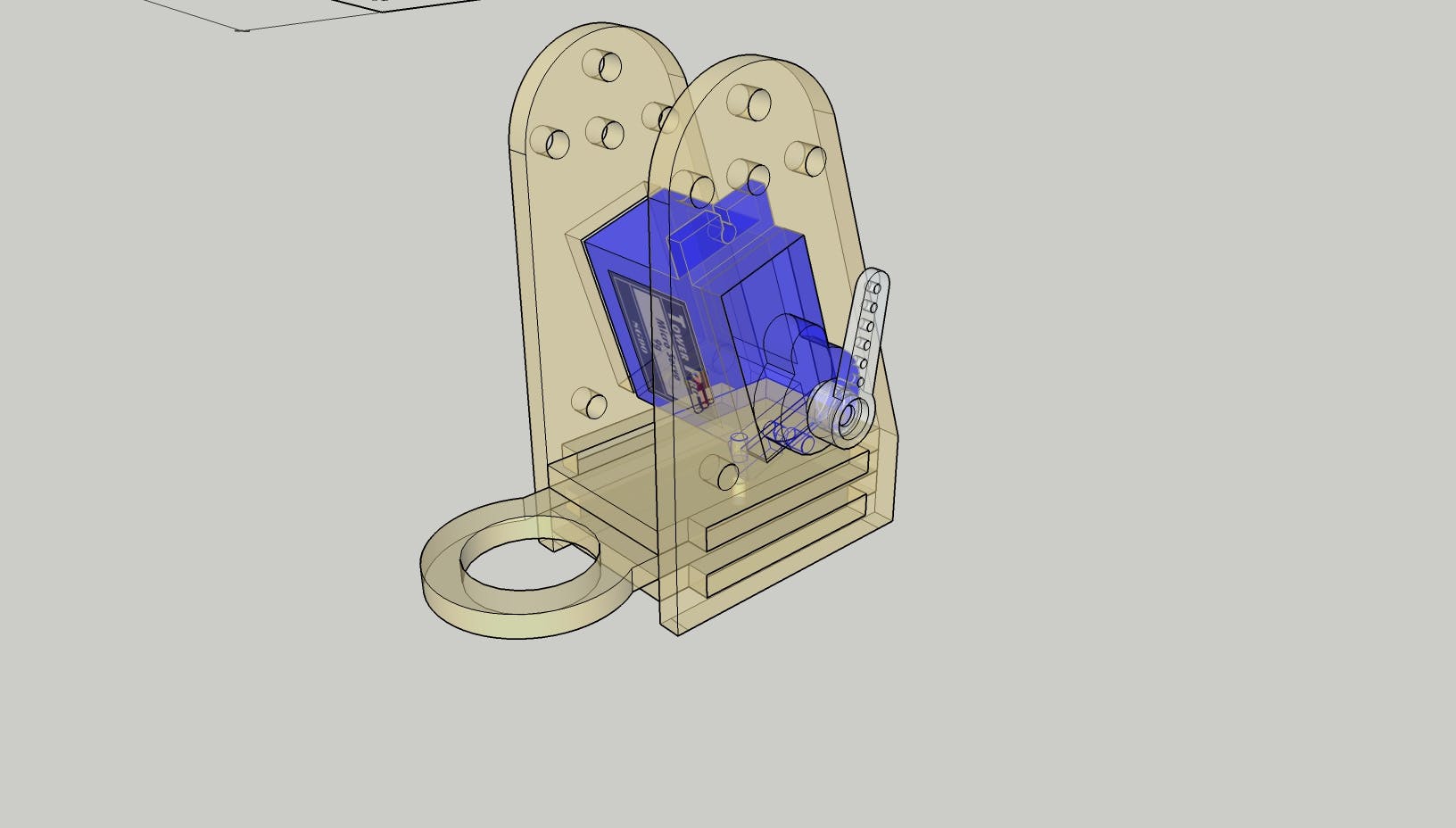
然后我决定让我自己的产品受到其他项目的启发,所以我使用了 Google Sketch up 2017 pro。每个部分都被设计成按特定顺序组装在一起,如下图所示。
在组装之前,我必须测试零件并选择合适的烙铁,这是通过绘制一个虚拟精加工项目作为我的指导来实现的。
这些图纸显示了实际完成的实物尺寸形状和每个零件的正确尺寸,以选择正确的烙铁。
第 2 步:操作和安装
在工作期间,我遇到了一些我们必须宣布的障碍。
1.手臂太重,无法被小型步进电机支撑,我们在下一个版本或激光切割打印中修复了这个问题。

2 、由于模型是塑料材质的,旋转底座摩擦力大,动作不流畅。
第一个解决方案是购买更大的步进电机,能够承受重量和摩擦,我们重新设计了底座以适应更大的步进电机。
其实问题还是和大马达都没有解决,那是因为旁边的两个塑料表面之间的摩擦我们无法按百分比调整锅。最大旋转位置不是驱动器所能提供的最大电流。您必须使用制造商提供的技术,在转动电位器时测量电压。
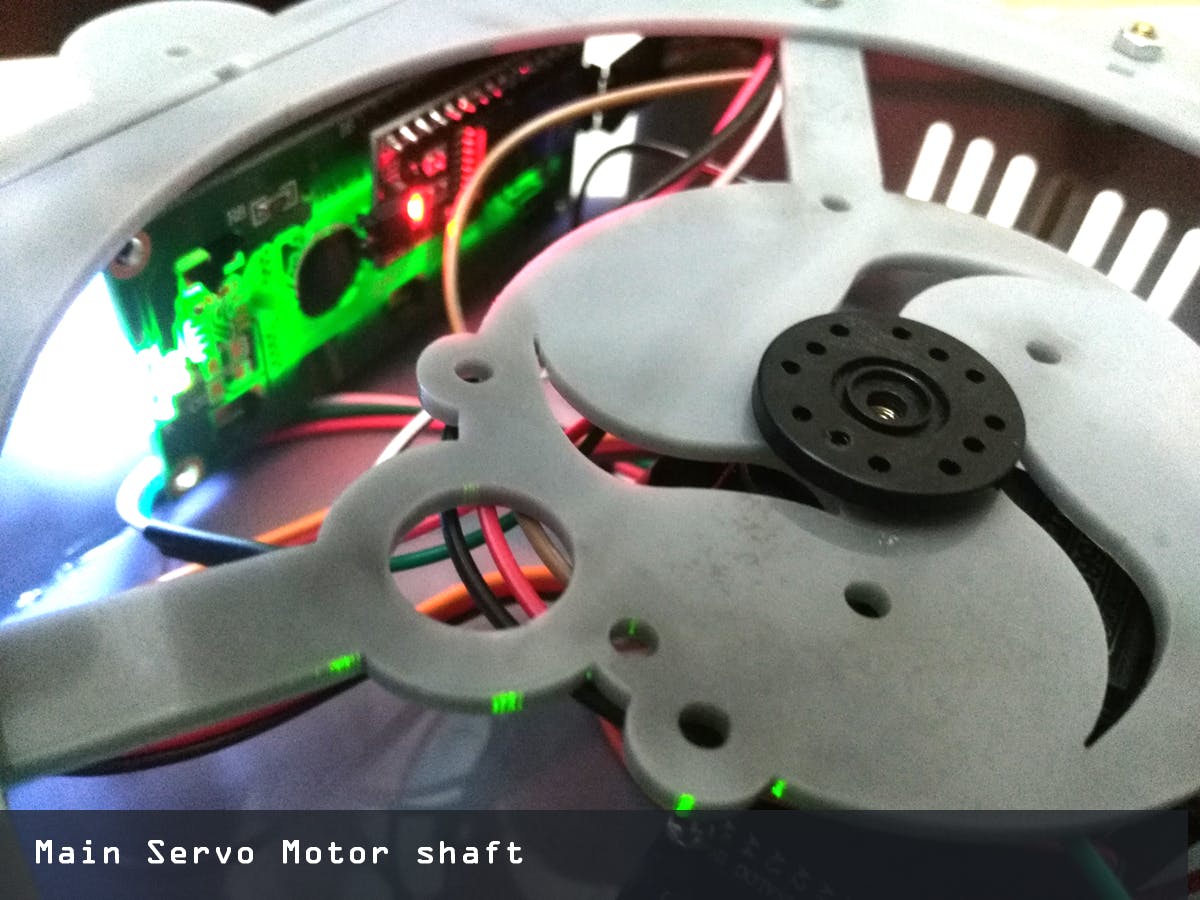
然后我采取了彻底改变基础设计的方法,将带有金属齿轮的伺服电机安装在齿轮机构中。
3.电压
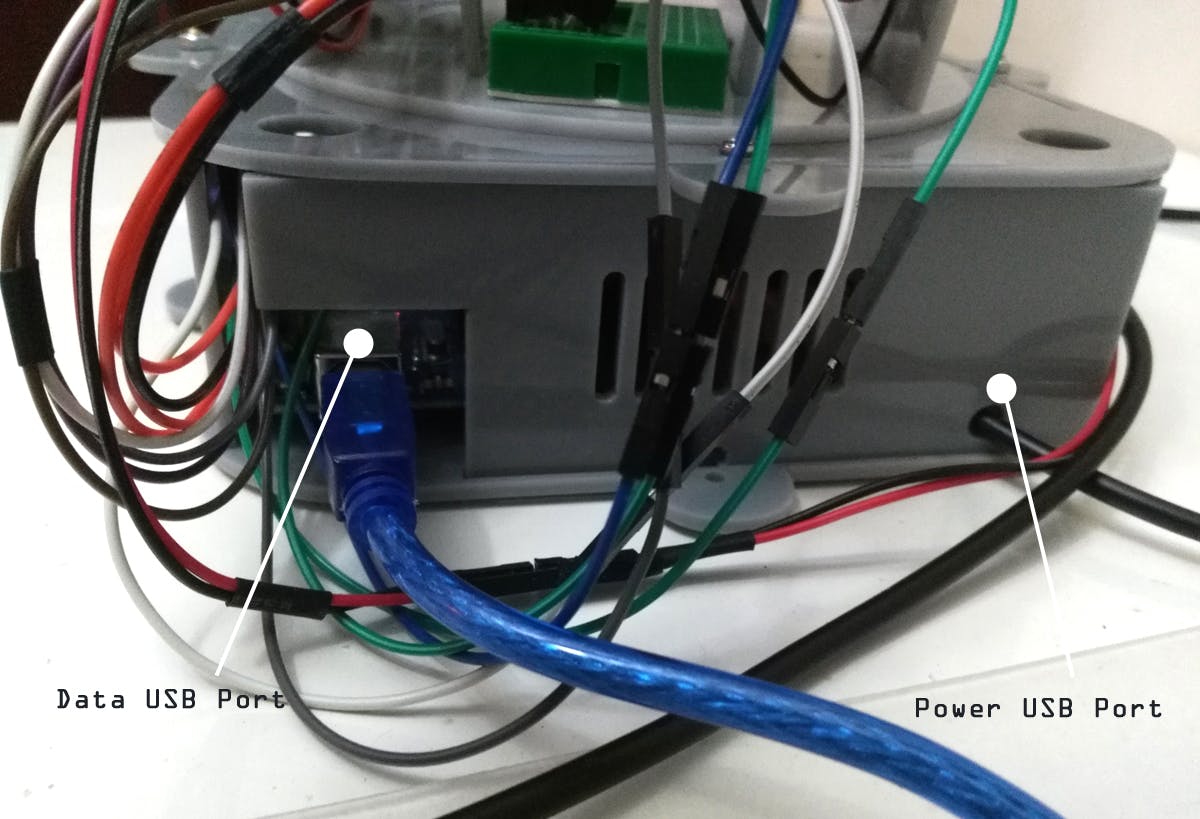
Arduino 板可以通过 DC 电源插孔 (7 - 12V)、USB 连接器 (5V) 或板的 VIN 引脚 (7-12V) 供电。通过 5V 或 3.3V 引脚提供电压绕过稳压器,我们决定从 PC 或任何电源购买支持 5 伏特的特殊 USB 电缆。
因此,步进电机和其他组件只需 5 伏即可正常工作,并确保零件免受我们修复降压模块的任何问题。
降压模块是一个降压转换器(降压转换器)是一种 DC-DC 电源转换器,它降低从其输入(电源)到其输出(负载)的电压(同时提高电流)并保持稳定性或电压。
第 3 步:修改
经过一些修改后,我们通过减小臂尺寸改变了模型的设计,并为伺服电机齿轮制作了合适的孔,如图所示。
在测试伺服电机的过程中,它成功地将重物旋转了 180 度,因为它的高扭矩意味着一个机构能够处理更重的负载。伺服机构可以输出多少转动力取决于设计因素——电源电压、轴速等。
使用 I2c 也很好,因为它只使用两个引脚,并且您可以将多个 i2c 设备放在相同的两个引脚上。因此,例如,您最多可以在两个引脚上拥有多达 8 个 LCD 背包+LCD!坏消息是您必须使用“硬件”i2c 引脚。
第 4 步:烙铁架或夹持器
夹具采用金属齿轮伺服电机固定,以承受烙铁的重量。
servo.attach(9, 1000, 2000);
servo.write (constrain (angle, 10, 160)) ;
起初,我们遇到了一个障碍,那就是电机抖动和振动,直到我们找到了一个给约束天使的棘手代码。
因为并非所有伺服系统都具有完整的 180 度旋转。许多人没有。
所以我们写了一个测试来确定机械极限在哪里。使用servo.write 微秒而不是servo.write 我更喜欢这个,因为它可以让你使用1000-2000 作为基本范围。许多伺服系统将支持超出该范围,从 600 到 2400。
所以,我们尝试了不同的值,看看你在哪里得到了告诉你已经达到极限的嗡嗡声。然后只在你写作时保持在这些限制内。您可以在使用servo.attach(pin, min, max) 时设置这些限制
找到真正的运动范围,并确保代码不会试图将其推过终点站,constrain () Arduino 函数对此很有用。
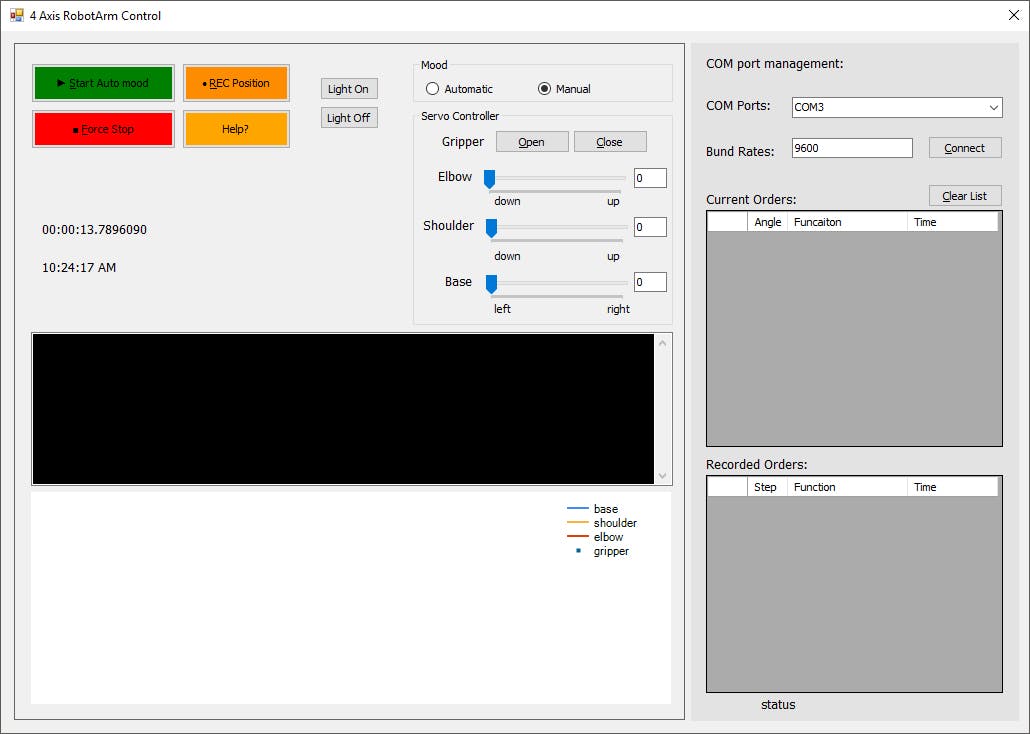
第 5 步:编码

Arduino使用库环境可以通过使用库来扩展,就像大多数编程平台一样。库提供用于草图的额外功能,例如使用硬件或操作数据。在草图中使用库。
#include AccelStepper.h#include MultiStepper.h
#include Servo.h
#include Wire.h
#include LiquidCrystal_I2C.h
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





