
资料下载


简单焊接机器人反馈
分享资料个
描述
嗨,我的名字是埃米尔。我是来自荷兰的机械工程专业的学生。这是我第一个真正的电子项目,它涉及编程,而不仅仅是并联电子设备和开关。在这个项目中,我正在尝试构建一个简单的焊接机器人。我的目标是尽可能多地学习并使其尽可能专业。到目前为止,我唯一买的是 Arduino 和电位器,我打算购买合适的零件,但不知道该选择哪些。到目前为止,我从 YouTube 和论坛中学到了很多东西,但要真正学到一些东西,我想得到一些反馈。我还有一些问题需要帮助。你愿意帮助我吗?太感谢了!
这个怎么运作:
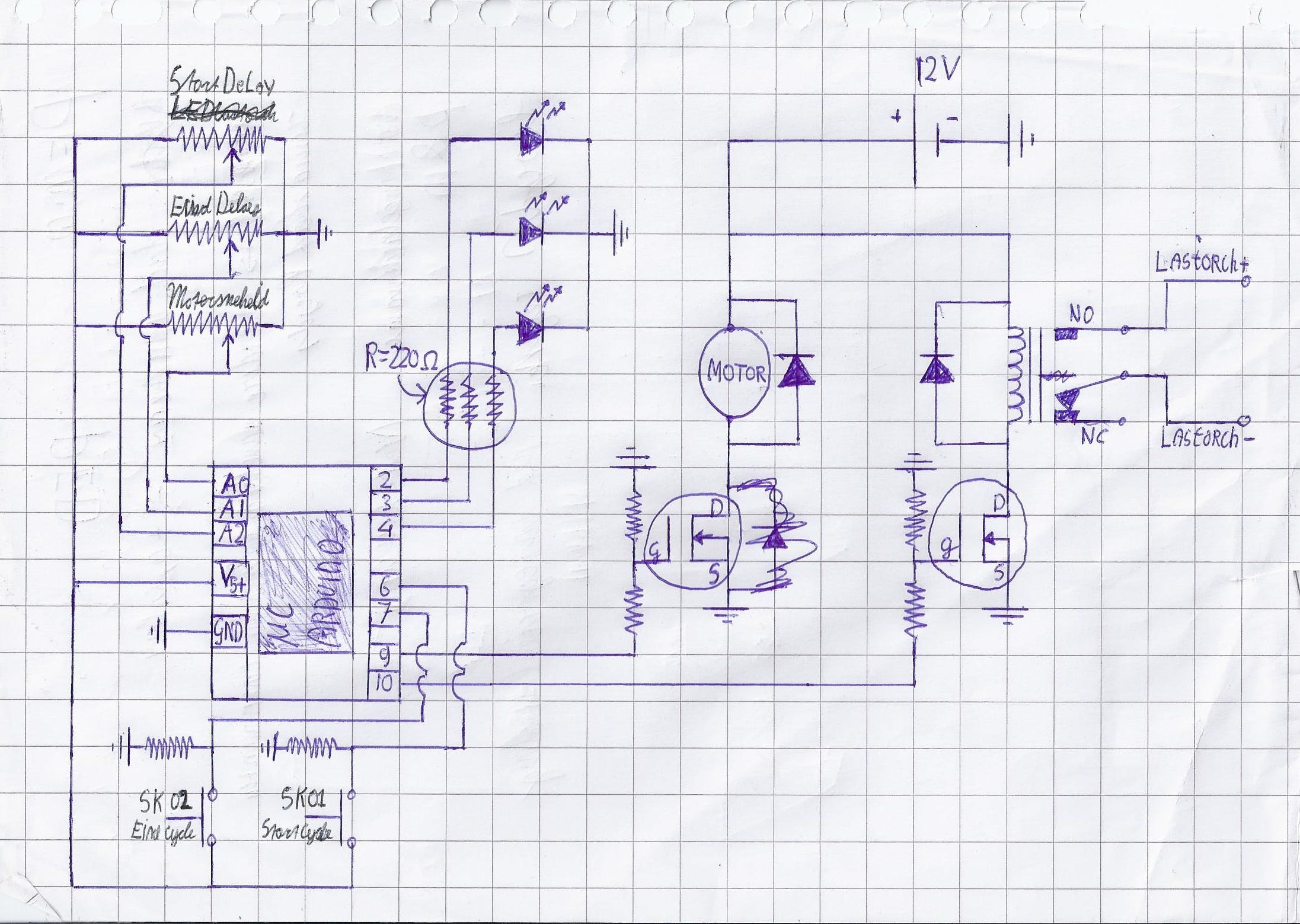
焊接机器人的目的是在旋转物体的同时进行焊接。这些是我的焊接机器人必须经过的步骤。
第 1 步 - LED 测试
在指示 LED 闪烁几次以确保它们工作。LED 用于指示 Arduino 是否准备就绪(绿色)、电机是否正在转动(黄色)以及焊枪继电器是否关闭(红色)。
第 2 步 - 归位
桌子开始转动,直到碰到微动开关。
第 3 步 - 循环
首先焊枪继电器将关闭,焊枪将在延迟(Startdelay= Startvertraging)后开始焊接,电机开始转动,直到它再次碰到微动开关。然后电机将停止转动,在Stopdelay( Stopvertraging) 之后,焊枪继电器将打开,焊枪停止焊接。
如果不清楚,请发表评论。
我的问题:
- 我应该使用电容器吗?我几乎在所有电子产品中都能看到它们,但我不知道为什么要使用它们。
- 我应该为我的下拉电阻选择哪个电阻值?
- 我应该为我的电位器选择哪个电阻值?
- 我应该使用哪种类型的二极管与我的电机并联并继电器以防止电压尖峰?
- 在这种情况下使用什么类型的 MOSFET?
- 如何对我的 Arduino 进行编程,以便在循环期间更改电机速度?我知道可以将电位器与 MOSFET 栅极串联,但是我想使用 PWM 来控制电机速度,这样我可以通过将最小占空比设置为 30% 来提供最小电压。
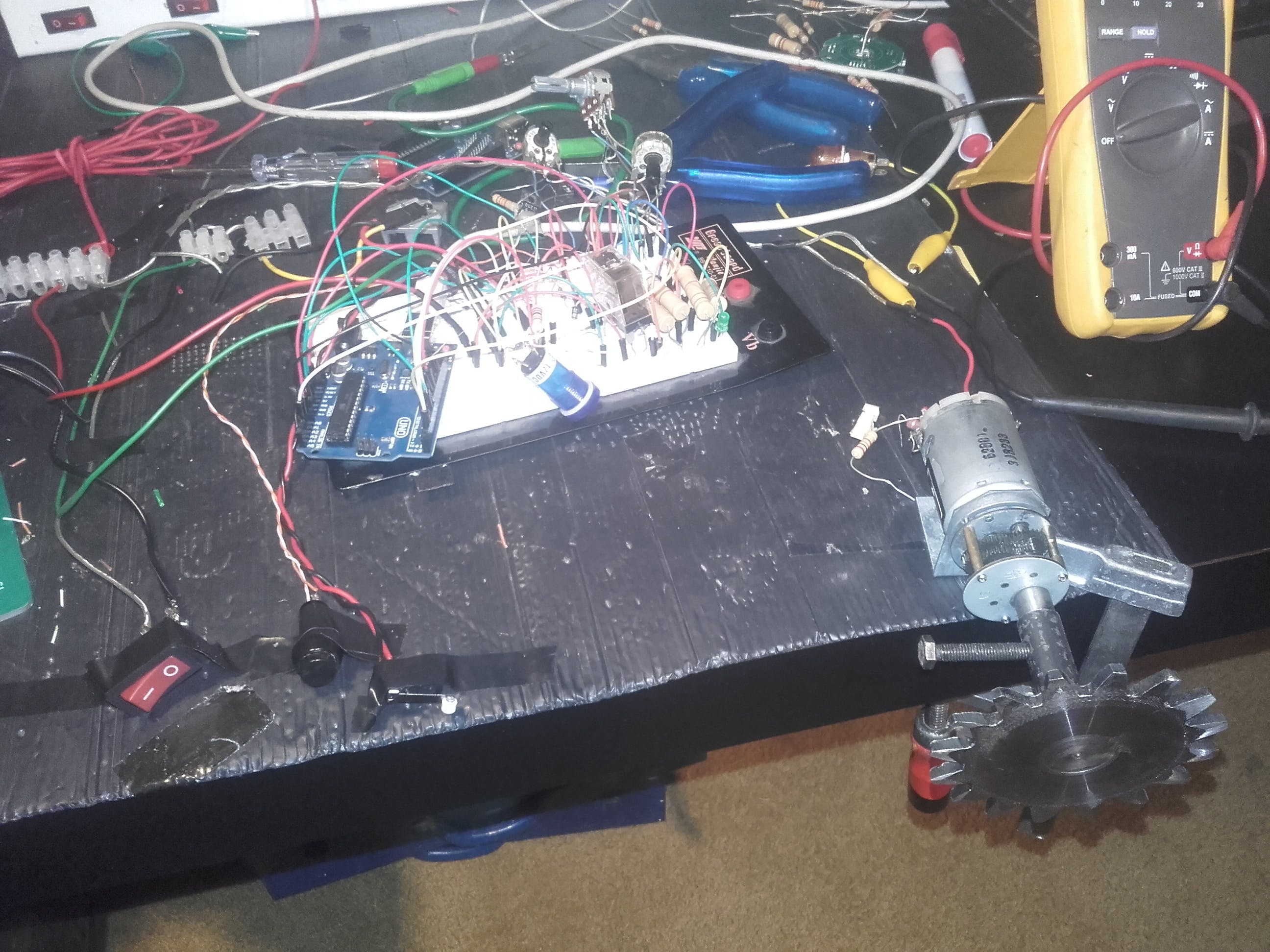
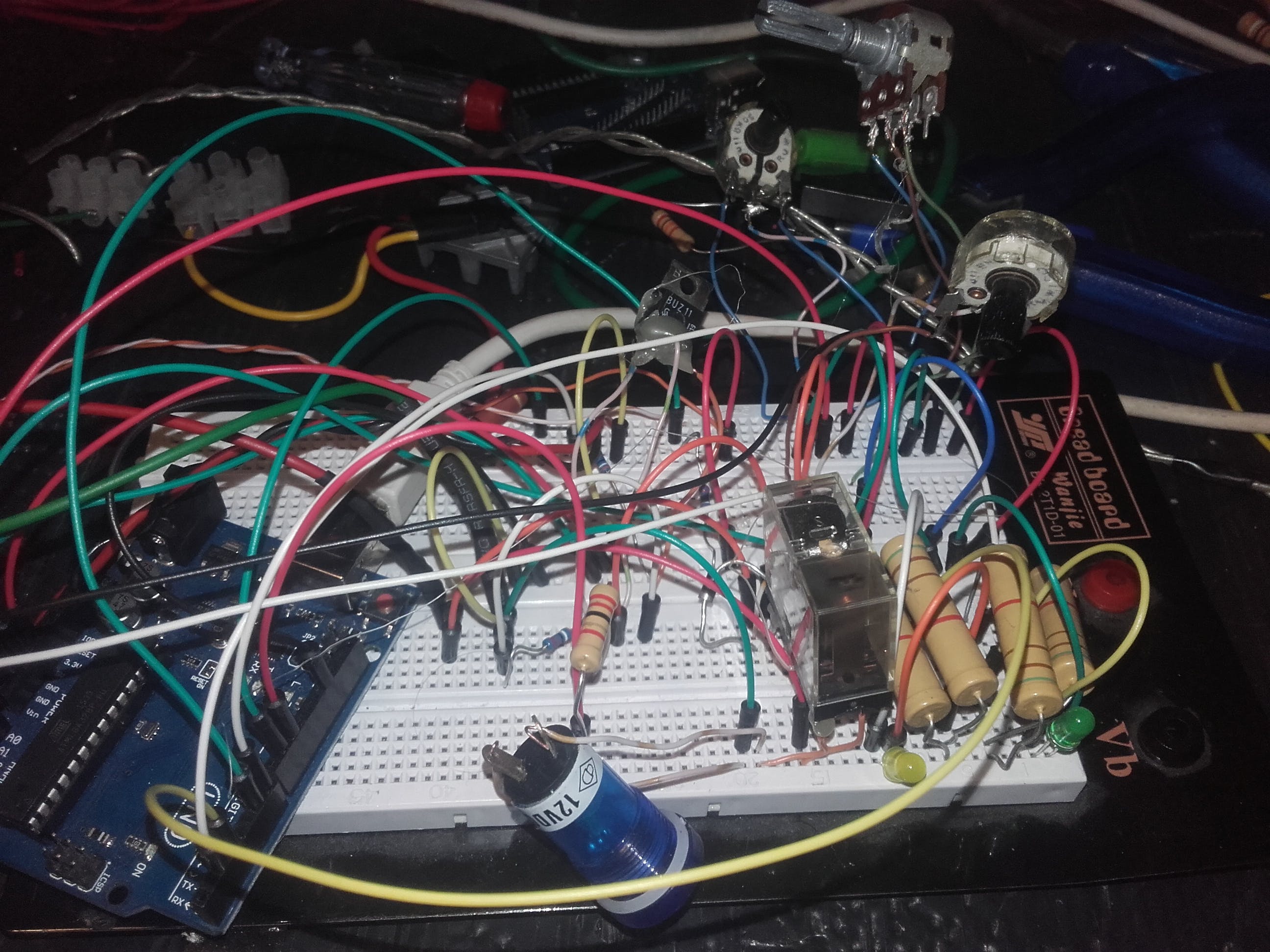
非常感谢你花时间阅读这篇文章,也许留下评论来帮助我。我打算在穿孔板上制作它,并为它制作一个铝制外壳。如果您想查看此内容和测试运行,请将其留在评论中。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






