
资料下载


×
无刷电机控制代码快速生成的原理分析及模型搭建
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-10-19
分享资料个
引言
随着软硬件技术的不断发展,以及用户对产品安全性,可靠性的要求,嵌入式应用的开发难度与代码体积都在迅速增加,传统的基于文本的开发方式已经越来越难以满足这种高性能与快节奏研发的要求。
基于模型的设计方法利用Mathworks提供的一系列工具,可直接实现从设计理念到算法模型,再由模型自动生成嵌入式代码的高效开发流程。对于本例来说,在LPC2124芯片上实现无刷电机控制(BLDC),设计者无需考虑如何将电机状态的变换用C或汇编语言体现,仅需关注算法本身,将繁琐的代码生成工作交给计算机完成。这样可以大大缩短产品开发周期,显著提高工作效率。
1 原理分析
直流无刷电机的工作离不开电子开关电路,因此由电动机本体、转子位置传感器和电子开关电路3部分组成了直流无刷电机的控制系统,其结构框图如图1所示。直流电源通过开关电路向电动机定子绕组供电,位置传感器随时检测转子所处的位置,并根据位置信号来控制开关管的导通和截止,从而自动地控制哪些绕组通电、哪些绕组断电,实现了电子换相。

图1 无刷电机控制系统结构框图
下面以一个三相绕组的无刷电机为例,简要介绍其工作原理。图2为三相全桥式驱动电路原理图,对其采用二相通电的方式驱动,即有两个绕阻同时通电。图中包含6个晶体管、二极管组成的三相逆变电路,Ha、Hb、Hc为霍尔元件反馈的转子位置信号。控制电路会根据位置信号决定6路PWM信号的通断,进而使功率管导通或关断,使绕阻按一定顺序导通,驱动电机连续旋转。
当采用二相导通方式驱动电机时,功率管的导通或关断情况经过1/6周期(即60°)。在直流无刷电机的内部嵌有3个霍尔位置传感器,它们在空间上相差120°。由于电机的转子是永磁体,当它在转动的时候,其磁场将发生变化形成旋转磁场,每个霍尔传感器都会产生180°脉宽的输出信号。
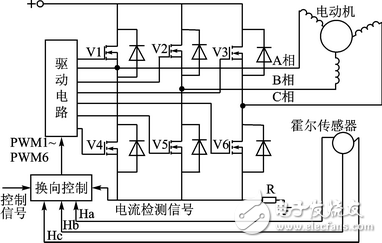
图2 三相全桥式驱动电路原理图
假设当前功率管V1、V6导通,则电流从A相流入电机,从C相流出电机,由电流经绕阻产生的磁场方向为(A,C)。由A和C的合磁场产生的转矩使转子转动到AC位置。转子的转动使霍尔传感器的输出发生变化,控制电路会据此调整功率管的导通情况,将V6关断,V5导通。这时,电流从A相流入电机,从B相流出电机,经绕阻产生的磁场方向为(A,B)。由A和B的合磁场产生的转矩使转子转动到AB位置。同样,霍尔器件又会输出一个不同的值,控制电路作出相应的处理,完成一个完整的换相周期。
随着软硬件技术的不断发展,以及用户对产品安全性,可靠性的要求,嵌入式应用的开发难度与代码体积都在迅速增加,传统的基于文本的开发方式已经越来越难以满足这种高性能与快节奏研发的要求。
基于模型的设计方法利用Mathworks提供的一系列工具,可直接实现从设计理念到算法模型,再由模型自动生成嵌入式代码的高效开发流程。对于本例来说,在LPC2124芯片上实现无刷电机控制(BLDC),设计者无需考虑如何将电机状态的变换用C或汇编语言体现,仅需关注算法本身,将繁琐的代码生成工作交给计算机完成。这样可以大大缩短产品开发周期,显著提高工作效率。
1 原理分析
直流无刷电机的工作离不开电子开关电路,因此由电动机本体、转子位置传感器和电子开关电路3部分组成了直流无刷电机的控制系统,其结构框图如图1所示。直流电源通过开关电路向电动机定子绕组供电,位置传感器随时检测转子所处的位置,并根据位置信号来控制开关管的导通和截止,从而自动地控制哪些绕组通电、哪些绕组断电,实现了电子换相。
图1 无刷电机控制系统结构框图
下面以一个三相绕组的无刷电机为例,简要介绍其工作原理。图2为三相全桥式驱动电路原理图,对其采用二相通电的方式驱动,即有两个绕阻同时通电。图中包含6个晶体管、二极管组成的三相逆变电路,Ha、Hb、Hc为霍尔元件反馈的转子位置信号。控制电路会根据位置信号决定6路PWM信号的通断,进而使功率管导通或关断,使绕阻按一定顺序导通,驱动电机连续旋转。
当采用二相导通方式驱动电机时,功率管的导通或关断情况经过1/6周期(即60°)。在直流无刷电机的内部嵌有3个霍尔位置传感器,它们在空间上相差120°。由于电机的转子是永磁体,当它在转动的时候,其磁场将发生变化形成旋转磁场,每个霍尔传感器都会产生180°脉宽的输出信号。
图2 三相全桥式驱动电路原理图
假设当前功率管V1、V6导通,则电流从A相流入电机,从C相流出电机,由电流经绕阻产生的磁场方向为(A,C)。由A和C的合磁场产生的转矩使转子转动到AC位置。转子的转动使霍尔传感器的输出发生变化,控制电路会据此调整功率管的导通情况,将V6关断,V5导通。这时,电流从A相流入电机,从B相流出电机,经绕阻产生的磁场方向为(A,B)。由A和B的合磁场产生的转矩使转子转动到AB位置。同样,霍尔器件又会输出一个不同的值,控制电路作出相应的处理,完成一个完整的换相周期。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






