
资料下载


×
基于DSP利用CCD传感实现对重物的动态实时测量
消耗积分:1 |
格式:rar |
大小:0.3 MB |
2017-10-24
分享资料个
引言
由于CCD具有尺寸小、重量轻、功耗低、超低噪声、动态范围较大、线性好、光计量准确、光谱响应范围宽、几何结构稳定、工作可靠和耐用等优点,因而在工件尺寸测量、工件表面质量检测、物体膨胀系数检测,以及图像传感、摄像机、智能传感器等方面得到了广泛应用。本文讨论利用CCD作为图像传感器结合光学技术对物体的重量进行测量。目前,对物体重量进行测量主要依据两种基本原理,一是利用力学中的杠杆平衡原理,二是利用各种传感器将物体的重量信息转化成电信号,再对此电信号进行分析处理提取该物体的重量信息。前者适用范围广,即可测出从非常轻到非常重的物体的重量,并且是一种经济的方法,但测量精度有限,需人工完成,因此这种方法无法达到实时动态测量。后者由于采用了传感器,有利于利用电子装置来对重量信息进行分析、计算,以及结果的显示,但是很多传感器受到动态范围的限制。本文则从光学技术角度结合力学原理利用CCD传感实现了对重物的动态实时测量。
测量原理
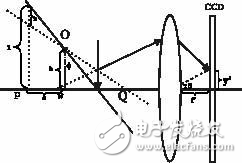
CCD对物体进行测量的原理如图1所示。平面镜的转动支点为O,且垂线OW交透镜轴为W点。W点位于f‘焦距与2f’之间。当没有测量物体时,平面镜与激光束的交角为θ。CCD放在透镜的右边,它和透镜中心的距离为f‘,这样便于计算y’。
下面分析其原理并导出测量公式。
1.被测物体在弹簧上产生形变。设物重为G,弹簧的弹性系数为k,形变为x,根据虎克定律:
G=kx (1)
2.将弹簧形变反映为平面镜的转角变化θ。
3.半导体激光器发出的连续平行激光,入射到平面反射镜上,平面镜不同位置对应于不同反射光线。反射光线聚集到CCD上,如图1所示,利用副光轴的作图法,不难得出下面关系式:
y‘=f’tg2θ (2)

其中y‘代表CCD上的光点到光轴的距离,f’代表透镜的焦距,θ代表平面反射镜的转角。由此可见如果能够通过CCD快速准确地获得y‘,那么通过求反函数就可以求得θ。
下面推导测物体重量G的公式,也就是要导出G与y’关系式。
其中l为弹簧原长,h为平面镜固定点距水平位置的高度,φ为平面镜处于平衡位置时与垂直方向的夹角。s为弹簧到平面镜固定点O水平方向上的距离。由图1可知:
|WQ|=h·tg(φ+θ)(3)
利用相似三角形比例公式有: (4)
又|PQ|=s+|WQ| (5)
由(3)、(4)、(5),得 (6)
由公式(2)、(6),得 (7)
将式(7)代入式(1),得
 (8)
(8)
由于CCD具有尺寸小、重量轻、功耗低、超低噪声、动态范围较大、线性好、光计量准确、光谱响应范围宽、几何结构稳定、工作可靠和耐用等优点,因而在工件尺寸测量、工件表面质量检测、物体膨胀系数检测,以及图像传感、摄像机、智能传感器等方面得到了广泛应用。本文讨论利用CCD作为图像传感器结合光学技术对物体的重量进行测量。目前,对物体重量进行测量主要依据两种基本原理,一是利用力学中的杠杆平衡原理,二是利用各种传感器将物体的重量信息转化成电信号,再对此电信号进行分析处理提取该物体的重量信息。前者适用范围广,即可测出从非常轻到非常重的物体的重量,并且是一种经济的方法,但测量精度有限,需人工完成,因此这种方法无法达到实时动态测量。后者由于采用了传感器,有利于利用电子装置来对重量信息进行分析、计算,以及结果的显示,但是很多传感器受到动态范围的限制。本文则从光学技术角度结合力学原理利用CCD传感实现了对重物的动态实时测量。
测量原理
CCD对物体进行测量的原理如图1所示。平面镜的转动支点为O,且垂线OW交透镜轴为W点。W点位于f‘焦距与2f’之间。当没有测量物体时,平面镜与激光束的交角为θ。CCD放在透镜的右边,它和透镜中心的距离为f‘,这样便于计算y’。
下面分析其原理并导出测量公式。
1.被测物体在弹簧上产生形变。设物重为G,弹簧的弹性系数为k,形变为x,根据虎克定律:
G=kx (1)
2.将弹簧形变反映为平面镜的转角变化θ。
3.半导体激光器发出的连续平行激光,入射到平面反射镜上,平面镜不同位置对应于不同反射光线。反射光线聚集到CCD上,如图1所示,利用副光轴的作图法,不难得出下面关系式:
y‘=f’tg2θ (2)
其中y‘代表CCD上的光点到光轴的距离,f’代表透镜的焦距,θ代表平面反射镜的转角。由此可见如果能够通过CCD快速准确地获得y‘,那么通过求反函数就可以求得θ。
下面推导测物体重量G的公式,也就是要导出G与y’关系式。
其中l为弹簧原长,h为平面镜固定点距水平位置的高度,φ为平面镜处于平衡位置时与垂直方向的夹角。s为弹簧到平面镜固定点O水平方向上的距离。由图1可知:
|WQ|=h·tg(φ+θ)(3)
利用相似三角形比例公式有: (4)
又|PQ|=s+|WQ| (5)
由(3)、(4)、(5),得 (6)
由公式(2)、(6),得 (7)
将式(7)代入式(1),得
(8)声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



