
资料下载


CCD双目立体视觉测量系统的理论研究详细说明
分享资料个
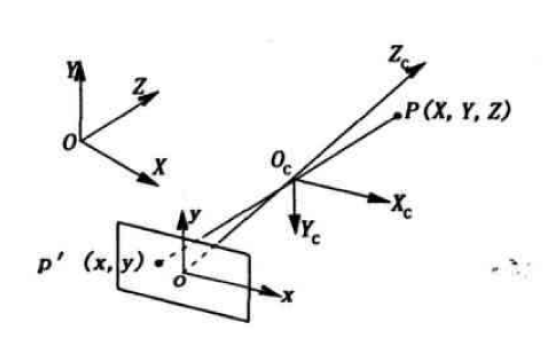
利用几何成像原理建立起CCD双目立体视觉测量系统的数学模型,从提高系统测量精度出发,在理论上重点对系统结构参数、图像识别误差与系统测量精度的关系进行了深入的分析和探讨,并通过实验对结论进行了验证。研究内容对实际建立该测量系统具有很强的指导作用。
双目立体视觉测量技术是计算机视觉中的一个重要分支,一直是计算机视觉研究的重点和热点之一。由于其近似于人眼视觉系统,具有较高的测量精度和速度,并具有结构简单,便于使用等优点,所以被广泛应用于工业检测、物体识别、工件定位、机器人自导引等诸多领域。近年来许多学者对此进行了大量的研究工作。其中大量的工作集中在对视觉测量系统的数学模型、系统的定标方法以及目标特征点匹配算法的研究上,而对系统的结构参数(两个CCD之间的距离、光轴夹角等)研究得却很少。对立体视觉结构参数进行了相应的理论研究,但它是从观看物体时的深度感出发研究CCD与物体之间的距离、两个CCD间距和观看距离3个参数之间的关系,没有涉及到结构参数对系统测量精度的影响。而实践证明系统的结构参数设置在实际应用中对于系统的测量精度是至关重要的。此外,从立体视觉测量原理中,可以看出图像识别误差是另一个对系统测量精度产生直接影响的重要因素。综合以上考虑,从理论上对系统的结构参数设置和图像识别误差对系统测量精度的影响进行了深入的分析和研究。结合系统结构参数对摄像机定标精度的影响,给出了实际应用中组建双目立体视觉测量系统的设计方案。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





