
资料下载


×
基于DSP与FPGA的运动控制器的软硬件设计方案分析
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-10-25
分享资料个
运动控制技术是数控机床的关键技术,其技术水平的高低将直接影响一个国家装备制造业的发展水平。目前,多轴伺服控制器越来越多地运用在运动控制系统中,具有较高的集成度和灵活性,可实时完成运动控制过程中复杂的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。本文选用DSP与FPGA作为运动控制器的核心部件,设计了通用型运动控制器。其中DSP用于运动轨迹规划、速度控制及位置控制等功能;FPGA完成运动控制器的精插补功能,用于精确计算步进电机或伺服驱动元件的控制脉冲,同时接收并处理脉冲型位置反馈信号。本文对该运动控制器的总体结构、硬件设计和软件设计进行了描述。
1 系统总体设计
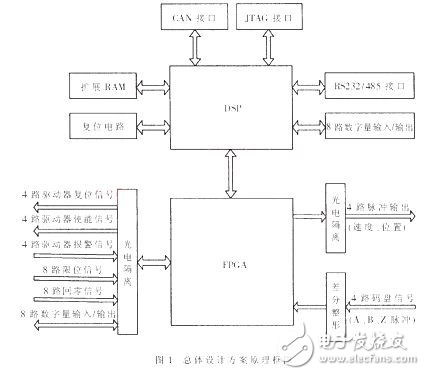
运动控制器的总体性能指标为:作为一个单独的运动控制器使用,控制信号采用数字量方式输出,能控制四轴的伺服电机;最高脉冲输出频率为4MP/s,能处理的编码器反馈信号最高频率为4MP/s;能接收和处理4路编码器反馈信号;可以处理原点信号、正负方向信号、到位信号以及急停信号等数字量输入信号;提供16路数字量输出信号和16路数字量输入信号接口。运动控制器采用DSP与FPGA芯片作为主控芯片,主要包括DSP模块、FPGA模块、FPGA外围电路模块和数字量输入输出接口模块。
采用基于DSP与FPGA的运动控制器,能够实时完成复杂的轨迹运算,而且利用DSP的高速数字信号处理功能和FPGA功耗低、主频高的优点,能充分显示该运动控制器的优点。采用DSP与FPGA相结合的运动控制器可以方便地对系统的控制策略进行修改,对控制参数进行修正,并可使设备具有良好的可靠性、可维修性,而且还降低了成本。系统还可以采用更多的智能控制策略,结构灵活,有较强的通用性,适合于模块化设计,能够提高算法效率,且易于维护和扩展。总体设计方案原理框图如图1所示。
2 系统硬件设计
2.1 DSP模块
本控制器采用TI公司的TMS320F2812为主控芯片,它是32位的控制专用DSP,内含FLASH,主频高达150 MHz,具有数字信号处理、事件管理和嵌入式控制功能,适用于大批量数据处理的场合。
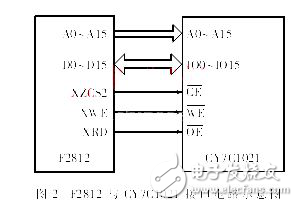
选用TI公司生产的TPS767D318芯片来实现TMS320F2812的电源设计,将5 V电源分别转换为3.3 V和1.8 V。SRAM是DSP常用的外围存储器,它具有接口简单、读写速度快等优点,所以选择大小为64 KB的随机存储器CY7C1021作为存储器扩展芯片。DSP F2812与CY7C1021接口电路如图2所示。
1 系统总体设计
运动控制器的总体性能指标为:作为一个单独的运动控制器使用,控制信号采用数字量方式输出,能控制四轴的伺服电机;最高脉冲输出频率为4MP/s,能处理的编码器反馈信号最高频率为4MP/s;能接收和处理4路编码器反馈信号;可以处理原点信号、正负方向信号、到位信号以及急停信号等数字量输入信号;提供16路数字量输出信号和16路数字量输入信号接口。运动控制器采用DSP与FPGA芯片作为主控芯片,主要包括DSP模块、FPGA模块、FPGA外围电路模块和数字量输入输出接口模块。
采用基于DSP与FPGA的运动控制器,能够实时完成复杂的轨迹运算,而且利用DSP的高速数字信号处理功能和FPGA功耗低、主频高的优点,能充分显示该运动控制器的优点。采用DSP与FPGA相结合的运动控制器可以方便地对系统的控制策略进行修改,对控制参数进行修正,并可使设备具有良好的可靠性、可维修性,而且还降低了成本。系统还可以采用更多的智能控制策略,结构灵活,有较强的通用性,适合于模块化设计,能够提高算法效率,且易于维护和扩展。总体设计方案原理框图如图1所示。
2 系统硬件设计
2.1 DSP模块
本控制器采用TI公司的TMS320F2812为主控芯片,它是32位的控制专用DSP,内含FLASH,主频高达150 MHz,具有数字信号处理、事件管理和嵌入式控制功能,适用于大批量数据处理的场合。
选用TI公司生产的TPS767D318芯片来实现TMS320F2812的电源设计,将5 V电源分别转换为3.3 V和1.8 V。SRAM是DSP常用的外围存储器,它具有接口简单、读写速度快等优点,所以选择大小为64 KB的随机存储器CY7C1021作为存储器扩展芯片。DSP F2812与CY7C1021接口电路如图2所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 huangronglin
2020-10-28
0 回复 举报谢谢,真心不错 收起回复
huangronglin
2020-10-28
0 回复 举报谢谢,真心不错 收起回复
- 相关下载
- 相关文章




