
资料下载


×
模糊控制器控制一级倒立摆
消耗积分:0 |
格式:rar |
大小:2.06 MB |
2017-11-09
分享资料个
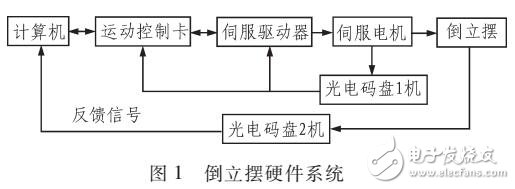
倒立摆是典型的重上支下的系统,具有多个特点,包括不稳定性、快速多变性、耦合性等,其系统成本低廉、结构简单、便于进行实验室操作。而且倒立摆具有多种功能,能对控制系统进行检验、对机器人的行走和火箭发射等进行控制,而且还能影响卫星的飞行姿势。因此,倒立摆的研究在理论突破和实践应用等方面具有重要意义。
起摆控制和稳定控制是学术界对倒立摆研究的两大内容。所谓起摆控制就是倒立摆从初始位置进行运动达到指定工作位置的控制,能量反馈法能够很好地实现倒立摆的起摆控制。而稳定控制是对倒立摆工作平衡点的控制,其控制规律众多,较有名的是应用于倒立摆系统平衡稳定控制的二次最优控制及基于方法创新的智能控制。
但是大部分关于倒立摆的文献都限定在一种控制器的研究上,各个控制器之间的优缺点不能有效地体现出来。因此,如何用统一的方法标准对个控制器进行评估将是未来研究的重点。本文将通过MATLAB对3种控制器模糊控制器、线性二次型调节器(LQR控制器)和比例一积分一微分控制器(PID控制器)进行建模评估,进而比较和分析各控制器优缺点,为以后进行倒立摆平衡控制提供理沦依据。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






