
资料下载


×
基于两自由度髋关节运动和MSP430单片机的机器人假肢控制系统
消耗积分:0 |
格式:rar |
大小:1.66 MB |
2017-11-10
分享资料个
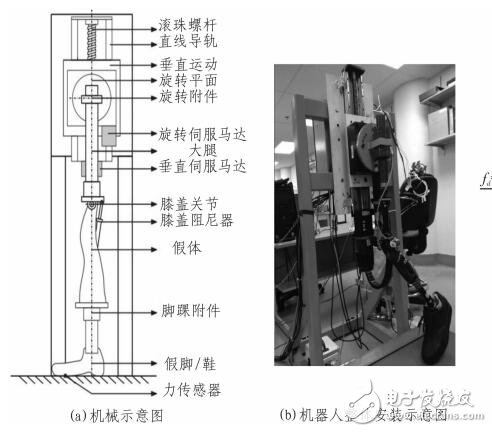
针对假肢自动化测试不可重复性和可能对测试病人造成的不安全问题,本文设计了一种基于两自由度髋关节运动和MSP430单片机的机器人假肢控制系统。设计的机器人可在矢状面平面重复两个自由度臀部运动,将跑步机作为机器人行走平面,利用基于关节坐标的机器人通用动态模型对假肢进行建模。采用MSP430F2274单片机设计假肢控制电路,选用TP4056芯片设计锂电池充电电路,利用TPS77001芯片将锂电池电压降至3V给单片机供电,利用LTC3426芯片将锂电池电压升至SV给直线步进电机供电,利用霍尔传感器A3144调理电路。实验验证了臀部位移、大腿角度、膝盖角度的偏差,结果显示,本文系统的输出结果与实际角度非常接近,有效地保证了假肢控制系统的安全性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




