
资料下载


×
基于微波雷达回波信号的智能车道划分方法
消耗积分:1 |
格式:rar |
大小:0.97 MB |
2017-11-27
分享资料个
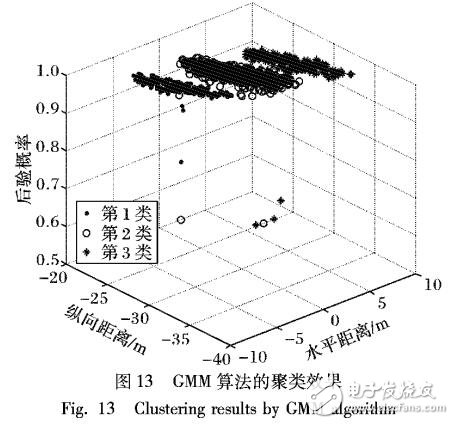
利用多目标交通测速雷达进行交通执法时,只有正确地判断出车辆所在的车道,抓拍照片才能作为交通执法的依据。传统的分车道方法主要通过人工测量的固定阈值以及坐标系旋转的方法来达到车道划分的目的,但这种方法误差较大并且不易于操作。基于统计和密度特征的核聚类算法( K-CSDF)分两步进行:首先对雷达获取的车辆数据进行特征提取,包括基于统计特征的阈值处理和基于密度特征的动态半径提取;然后引入基于核的相似性的动态聚类算法对筛选出的有效点进行聚类。通过和高斯混合模型( GMM)算法以及自组织映射神经网络(SOM)算法进行仿真对比表明:当只取100个有效点进行聚类时,K-CSDF和SOM算法能达到90%以上的分车道正确率,而CMM算法不能给出车道中心线;在算法用时上,当取1000个有效点时,K-CSDF和GMM算法用时均小于Is,可以保证实时性,而SOM算法则需要2.5 s左右;在算法鲁棒性上,K-CSDF对不均匀样本的适应性优于这两种算法。当取不同数量的有效点进行聚类时,K-CSDF可以达到95%以上的平均分车道正确率。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(3)
发评论
-
 zanming1986
2020-11-26
0 回复 举报怎么下载不了啊 收起回复
zanming1986
2020-11-26
0 回复 举报怎么下载不了啊 收起回复
-
zanming1986
2020-11-26
0 回复 举报感谢 收起回复
全部评论
- 相关下载
- 相关文章




