
资料下载


×
节能型循环泵控制器解析
消耗积分:0 |
格式:rar |
大小:0.4 MB |
2017-12-06
分享资料个
摘要
为了制造出更加节能高效、调控性能良好的空调、水泵等变频电器,设计者不断的提高电机控制技术。永磁同步电机( permanent magnet synchronous motor, PMSM)具有体积小、效率高、控制精度高、调速范围宽等特点,已成为变频控制领域的主流电机之一。为了实现高性能的转速控制,PMSM 控制系统一般安装有机械式速度/位置传感器。但是机械式速度/位置传感器的使用不仅增加了系统的成本,也使得 PMSM 体积变大。同时,复杂、恶劣的工作环境大大降低了速度/位置传感器的可靠性。因此,为了降低系统成本,提高系统的可靠性等的要求,无速度/位置传感器(一般简称无传感器, sensorless)控制技术成为了当前的技术热点。
基于无传感器技术的永磁同步电机 PMSM 矢量控制调速系统结构简单、易维护、体积小、成本低,能应用于一些特殊场合,因此成为了当前的研究热点之一。无传感器控制的核心是转子位置和转速估计,估计的精度和稳定性决定了系统控制性能的优劣。基于滑模观测器(slide mode observer, SMO)的位置估计方法结构简单、易于实现,从而得到了广泛的应用。
1986 年召开的第 25 届决策和控制会议上,麻省理工学院的 J.J.Slotine 教授提出使用SMO 实现非线性估计问题,奠定了滑模观测器应用与转子位置估计的基础。SMO 是利用滑模变结构控制系统对参数扰动鲁棒性强的特点,将状态观测器中的控制回路用滑模变结构代替,从而达到良好的估计效果。滑模变结构是为控制系统预先在状态控制上设计一个特殊的开关面,在系统变量从起始点运动到开关面之前,系统的控制结构维持一种形式;当系统变量达到开关面之后,开始自适应的调整率控制,最终使系统状态沿着开关面一直滑动到平衡点,此时系统的控制结构又维持另一种形式。滑模变结构对参数变化及扰动有良好的鲁棒性,且结构简单、响应速度快,因此在 PMSM 位置估计中得到了广泛的应用。
本文基于滑模观测器在无位置传感器电机控制系统中的应用展开讨论,并给出无传感器系统相应的软硬件实现。
1、节能型循环泵控制器硬件系统
某隔离电源系统完成 DC/DC 的转换,采用全桥拓扑,输出电压为 12V。其中,全桥的原边侧驱动器就采用了UCC27201,共计两颗。
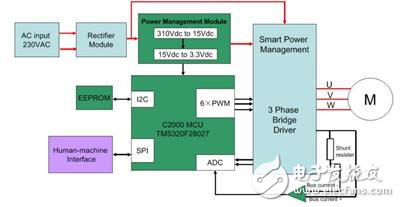
图1-1 节能型循环泵控制器硬件系统
节能型循环泵控制器包括主电路模块、控制电路模块和人机交互模块。
主电路模块包括 EMC 滤波器、整流桥、集成功率器件和驱动的 IPM模块。230Vac 市电经过EMC 滤波器、整流桥整流后变为高压直流电,三相全桥逆变电路将高压直流电逆变为三相交流电实现对电机的控制。
控制电路模块包括微控制器 F28027 的最小控制系统、两路的定子电流检测及调理电路、直流母线电压检测电路、过流保护电路、电源管理模块。
人机交互模块通过 SPI 通信和普通 I/O 口与 MCU 进行通信,可以实时显示电机的转速和电机功率等参数,也可以通过按键设置电机的转速给定值和输出功率的的最大值。
为了制造出更加节能高效、调控性能良好的空调、水泵等变频电器,设计者不断的提高电机控制技术。永磁同步电机( permanent magnet synchronous motor, PMSM)具有体积小、效率高、控制精度高、调速范围宽等特点,已成为变频控制领域的主流电机之一。为了实现高性能的转速控制,PMSM 控制系统一般安装有机械式速度/位置传感器。但是机械式速度/位置传感器的使用不仅增加了系统的成本,也使得 PMSM 体积变大。同时,复杂、恶劣的工作环境大大降低了速度/位置传感器的可靠性。因此,为了降低系统成本,提高系统的可靠性等的要求,无速度/位置传感器(一般简称无传感器, sensorless)控制技术成为了当前的技术热点。
基于无传感器技术的永磁同步电机 PMSM 矢量控制调速系统结构简单、易维护、体积小、成本低,能应用于一些特殊场合,因此成为了当前的研究热点之一。无传感器控制的核心是转子位置和转速估计,估计的精度和稳定性决定了系统控制性能的优劣。基于滑模观测器(slide mode observer, SMO)的位置估计方法结构简单、易于实现,从而得到了广泛的应用。
1986 年召开的第 25 届决策和控制会议上,麻省理工学院的 J.J.Slotine 教授提出使用SMO 实现非线性估计问题,奠定了滑模观测器应用与转子位置估计的基础。SMO 是利用滑模变结构控制系统对参数扰动鲁棒性强的特点,将状态观测器中的控制回路用滑模变结构代替,从而达到良好的估计效果。滑模变结构是为控制系统预先在状态控制上设计一个特殊的开关面,在系统变量从起始点运动到开关面之前,系统的控制结构维持一种形式;当系统变量达到开关面之后,开始自适应的调整率控制,最终使系统状态沿着开关面一直滑动到平衡点,此时系统的控制结构又维持另一种形式。滑模变结构对参数变化及扰动有良好的鲁棒性,且结构简单、响应速度快,因此在 PMSM 位置估计中得到了广泛的应用。
本文基于滑模观测器在无位置传感器电机控制系统中的应用展开讨论,并给出无传感器系统相应的软硬件实现。
1、节能型循环泵控制器硬件系统
某隔离电源系统完成 DC/DC 的转换,采用全桥拓扑,输出电压为 12V。其中,全桥的原边侧驱动器就采用了UCC27201,共计两颗。
图1-1 节能型循环泵控制器硬件系统
节能型循环泵控制器包括主电路模块、控制电路模块和人机交互模块。
主电路模块包括 EMC 滤波器、整流桥、集成功率器件和驱动的 IPM模块。230Vac 市电经过EMC 滤波器、整流桥整流后变为高压直流电,三相全桥逆变电路将高压直流电逆变为三相交流电实现对电机的控制。
控制电路模块包括微控制器 F28027 的最小控制系统、两路的定子电流检测及调理电路、直流母线电压检测电路、过流保护电路、电源管理模块。
人机交互模块通过 SPI 通信和普通 I/O 口与 MCU 进行通信,可以实时显示电机的转速和电机功率等参数,也可以通过按键设置电机的转速给定值和输出功率的的最大值。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章







