
资料下载


×
基于FPGA的CAN总线控制器SJA1000软核的设计方案解析
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-12-07
分享资料个
控制局域网(CAN)属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。与一般的通信总线相比,CAN总线的数据通信可靠性、实时性和灵活性好,应用领域非常广泛,通常基于ARM或51单片机,实现与CAN控制器的通信联络。FPGA/SOPC技术是实现嵌入式系统的最高形式,基于IP软核的设计与应用也必将成为替代硬核的一种发展趋势。凭借QuartuslI和NiosII工具,基于FPGA的VHDL(或Verilog)语言设计的IP核能够提供灵活性和性能更好的控制器。
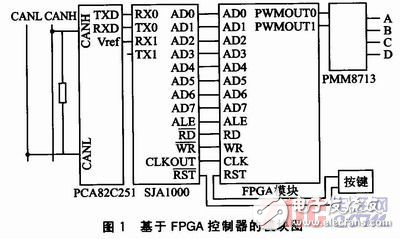
图1为一个基于FPGA的控制器的CAN总线节点。其中PCA82C251是CAN总线接收器,SJA1000是CAN总线通信控制器,PMM8713是驱动步进电机的脉冲分配器,FPGA模块在节点模型中对SJA1000进行控制,并将接收到的帧信息进行处理,发送给脉冲分配器,以驱动步进电机。
在设计中采用自顶向下的设计方法。通过分析SJA1000常用的控制芯片51单片机的功能,将其分为主要的4个模块:初始化模块、位查询模块、数据处理模块和缓冲区释放模块。
对SJA1000完成控制功能的过程用状态图描述如图2所示,这也是系统的主状态机。4个状态对应上述的4个功能模块,首先在initial_st-ate完成对sJA1000的初始化,在由init_end信号给出初始化完成标志后,进入查询状态,即query_RBS状态,由位查询模块完成此时对SJA100 0的状态查询。如果查询到SJA1000缓冲区有帧信息,将qRBS_end置“1”,进入下一个状态frame_cope,即帧处理状态,此时由数据处理模块完成对缓冲区的数据读取,并作处理。在读取完一帧数据后,需要释放缓冲区,为下一帧信息的接收做准备。此时状态转入了release_buff-er,对应功能模块中的缓冲区释放模块,此状态结束后又转入位查询状态,为下一帧信息接收做准备。
图1为一个基于FPGA的控制器的CAN总线节点。其中PCA82C251是CAN总线接收器,SJA1000是CAN总线通信控制器,PMM8713是驱动步进电机的脉冲分配器,FPGA模块在节点模型中对SJA1000进行控制,并将接收到的帧信息进行处理,发送给脉冲分配器,以驱动步进电机。
在设计中采用自顶向下的设计方法。通过分析SJA1000常用的控制芯片51单片机的功能,将其分为主要的4个模块:初始化模块、位查询模块、数据处理模块和缓冲区释放模块。
对SJA1000完成控制功能的过程用状态图描述如图2所示,这也是系统的主状态机。4个状态对应上述的4个功能模块,首先在initial_st-ate完成对sJA1000的初始化,在由init_end信号给出初始化完成标志后,进入查询状态,即query_RBS状态,由位查询模块完成此时对SJA100 0的状态查询。如果查询到SJA1000缓冲区有帧信息,将qRBS_end置“1”,进入下一个状态frame_cope,即帧处理状态,此时由数据处理模块完成对缓冲区的数据读取,并作处理。在读取完一帧数据后,需要释放缓冲区,为下一帧信息的接收做准备。此时状态转入了release_buff-er,对应功能模块中的缓冲区释放模块,此状态结束后又转入位查询状态,为下一帧信息接收做准备。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 jf_19762247
2020-12-04
0 回复 举报啥都没有 收起回复
jf_19762247
2020-12-04
0 回复 举报啥都没有 收起回复
- 相关下载
- 相关文章





