
资料下载


×
基于移动水质监测平台动态避障
消耗积分:2 |
格式:rar |
大小:0.85 MB |
2017-12-28
分享资料个
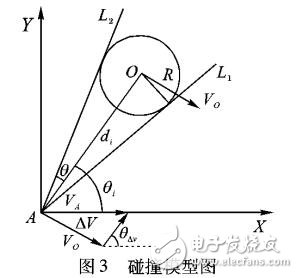
针对移动水质监测平台在自主导航中遇到移动障碍物的问题,提出了一种将障碍物运动状态预测模型结合速度避障碰撞模型的动态避障新方法。首先,通过移动水质监测平台上的超声波测距模块和图像采集模块测量移动水质监测平台与障碍物的距离和相对方位角,采用坐标系转换的方法计算出障碍物速度和运动方向;其次,利用极大似然估计法建立障碍物运动状态预测模型,通过该模型得到下一个采样时刻障碍物速度和运动方向范围;最后,利用速度避障的碰撞模型,计算出下一时刻的移动水质监测平台的航向角。实验结果证明,所提的避障方法能够规划出一条更为真实的较优路径。与无障碍物运动状态预测模型的避障方法相比,该避障方法能提高动态避障的成功率。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






