
资料下载


×
使用树莓派的避障车
消耗积分:0 |
格式:zip |
大小:0.04 MB |
2022-12-09
分享资料个
描述
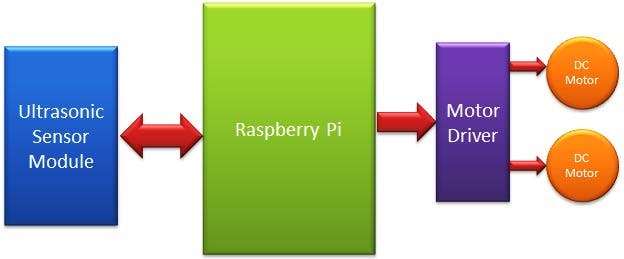
机器人是通过自动化工业、工厂、医院等中的任务来减少繁重工作中人力的机器。大多数汽车都是通过使用一些控制单元或组件,如按钮、遥控器、操纵杆、PC、手势和通过通过使用控制器或处理器执行一些命令。但今天我们在这里看到一辆自动驾驶汽车,它在没有任何外部事件的情况下自主移动,避开了其路径上的所有障碍物,是的,我们谈论的是避障车。在这个项目中,我们使用了Raspberry Pi 和 Motor driver来驱动汽车和超声波传感器来检测汽车路径中的物体。
它是如何工作的:
这辆自动驾驶汽车的工作非常容易。当汽车通电开始行驶时,树莓派通过超声波传感器模块测量前方物体的距离,并存储在一个变量中。然后 RPi 将此值与预定义值进行比较,并相应地做出将汽车向左、向右、向前或向后移动的决定。
在这个项目中,我们选择了 15cm 的距离来让Raspberry Pi 做出任何决定。现在,每当 Raspberry Pi 与任何物体的距离小于 15 厘米时,Raspberry Pi 就会停下汽车并将其移回,然后向左或向右转弯。现在在再次前进之前,树莓派再次检查15cm距离范围内是否有障碍物,如果有则再次重复之前的过程,否则继续前进,直到再次检测到障碍物或物体。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





