
资料下载


×
无人机环绕目标飞行控制
消耗积分:1 |
格式:rar |
大小:0.51 MB |
2018-01-05
分享资料个
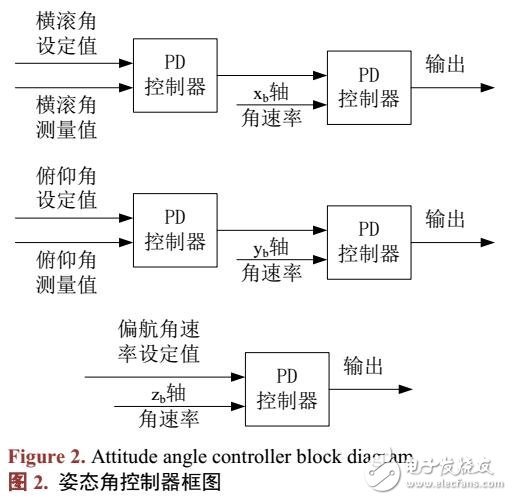
论述了利用激光雷达测量信息解算无人机机头方向与环绕目标中心方向角度差即转差角和无人机与环绕目标间距离的方法。通过EKF融合陀螺仪、加速度计和磁力计数据用于无人机的姿态解算,采用具有角速率内环和角度外环的双环PD控制器进行无人机的姿态控制。将由激光雷达信息解算出的转差角反馈到转向控制PID控制器,控制器的输出量接入偏航角控制器用于机头锁定目标。将目标距离反馈到定距控制PID控制器,控制器的输出量接入俯仰角控制器用于维持无人机与环绕目标间的距离。两控制器相结合控制无人机环绕目标飞行。搭建了四旋翼无人机实验平台,通过柱状物体环绕实验验证了利用激光雷达解算数据控制四旋翼环绕目标飞行的可行性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




