
资料下载


×
GPS信号跟踪算法
消耗积分:2 |
格式:rar |
大小:0.69 MB |
2018-01-13
分享资料个
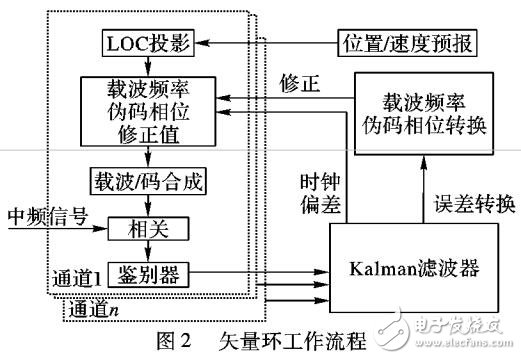
针对传统全球定位系统( GPS)接收机在高动态环境下跟踪性能不理想,提出一种基于载波频率辅助相位的GPS信号跟踪算法。利用锁频环(FLL)辅助锁相环(PLL)的方式代替传统单一跟踪环路,通过卡尔曼(Kalman)滤波器对接收机各跟踪通道中频信号进行综合处理。根据多条跟踪通道的伪距和伪距率残差对系统状态参量进行综合估计,并搭建Kalman滤波器的状态方程和量测方程,给出了跟踪环路反馈量,与传统标量跟踪模式下的跟踪性能进行了对比。仿真结果表明,基于载波频率辅助相位的CPS信号跟踪算法进入稳态时间减小了100 ms,位置误差精度提高了5m,速度误差精度提高了近3m/s,在接收机用户快速运动的环境下,能够很好地处理高动态信号。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章


下载排行榜
- 暂无相关数据

