
资料下载


×
一种柔性触觉传感阵列力觉标定
消耗积分:3 |
格式:rar |
大小:0.83 MB |
2018-01-19
分享资料个
电子仿生皮肤在辅助智能机器人感知外界环境信息、实现人机交互等方面具有重要的作用。具备柔性、可穿戴特点的触觉传感器成为当今电子仿生皮肤的发展趋势之一,并在医疗康复州、工业生产等领域中得到广泛应用。为实现大面积触觉感知,通常将柔性触觉传感器设计为阵列结构,随着智能机器人的发展,对触觉传感器传的感知功能提出更高要求,触觉信息对智能机器人准确获悉目标对象信息、提升操作精度等具有重要意义。与此同时,一种可实现柔性触觉传感阵列的力觉标定装置成为研究热点之一。
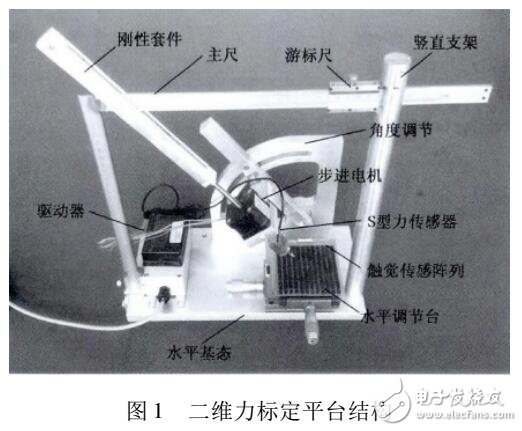
为解决现有触觉力标定系统不易实现对柔性触觉传感阵列中任意触觉单元进行标定,且存在精度低、不易操作等弊端,设计并研制了一种柔性触觉传感阵列力觉标定及加载系统。利用STM32F103VET6高性能微处理器控制步进电机以联动S型高精度压力传感器实现二维力的精确加载与标定,并将标定信息于上位机实时图形化显示。介绍了标定平台的结构特点、工作原理及系统软硬件设计,通过对系统误差分析及平台标定测试,可实现二维力加载范围0-50 N,法向与切向精确度为0.18%FS。触觉力加载应用实验表明,该加载平台具有较高的测量精度和较强的实用性,为不同结构单元的柔性触觉传感阵列二维力标定及加载提供了便利。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



