
资料下载


×
电液比例高低机系统模糊PID控制研究
消耗积分:1 |
格式:rar |
大小:0.78 MB |
2018-03-22
分享资料个
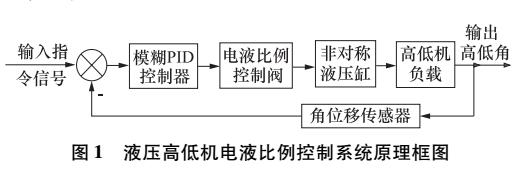
液压高低机系统具有传力平稳、承载能力大、易于自动化控制等优点,主要采用比例阀控制液压执行机构的输出位移量而改变高低机上下支点之间的距离,使得起落部分绕耳轴旋转,在一定精度下赋予合适的高低俯仰角。
研究电液比例高低机控制系统,考虑阀控非对称缸系统正反向行程的非对称性、摩擦等因素,通过状态方程组形式建立了电液比例阀控非对称缸驱动高低机系统的非线性模型。在MATLAB/Simulink中采用模糊自适应PID控制方式,建立电液比例高低机模糊PID控制模型并进行仿真,结果与传统PID控制方式相比,能有效地改善高低机系统的动态特性,满足实际高低机控制特性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





