
智能车浅谈——手把手让车跑起来(电磁篇)
智能车电磁组——基本控制篇
汽车电子芯片数量大增:从 500 颗到 3000 颗,锡膏如何撑起可靠性大旗?
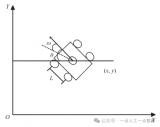
复杂环境下多无人智能车辆协同调控

20.4-使用两个通道进行PID电磁循迹 电磁循迹小车 电磁循迹算法 智能车环岛

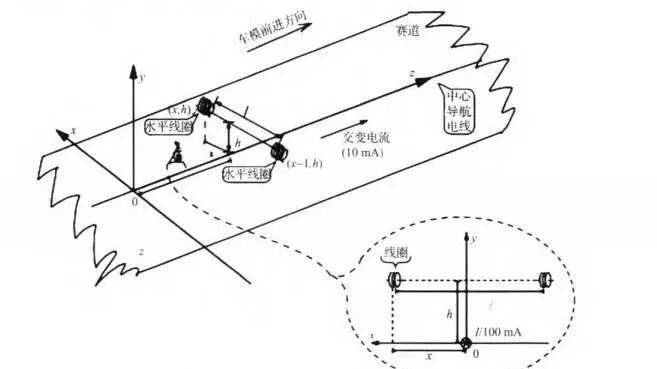
20.3-使用两个通道进行电磁循迹 智能车竞赛 电磁杆原理图 电磁循迹小车 STM32电磁小车 电磁循迹算法

20.2-电磁杆在磁轨道的测试 零基础入门智能车竞赛 STM32电磁小车
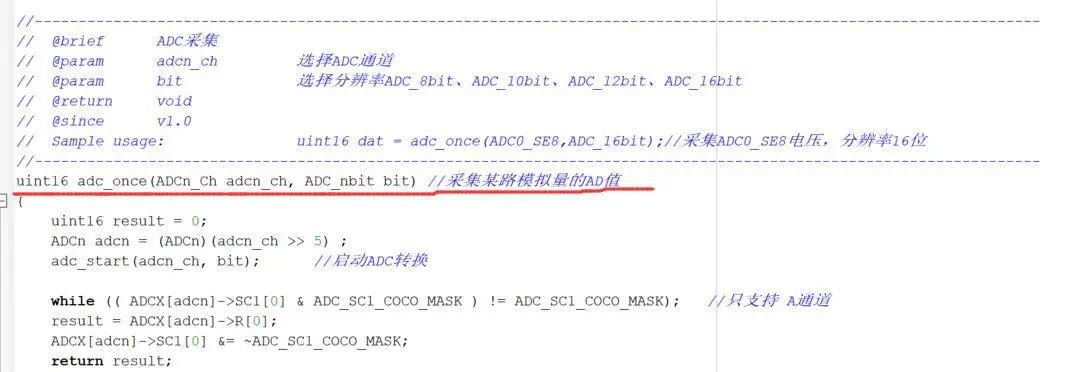
智能车中电磁归一化该怎么处理
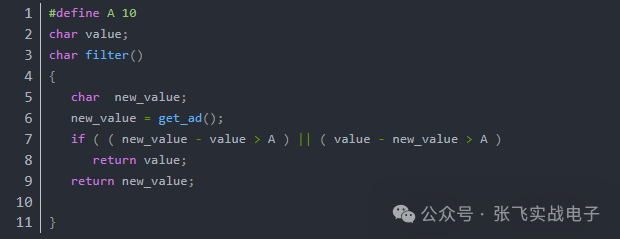
智能车电磁采集滤波方法
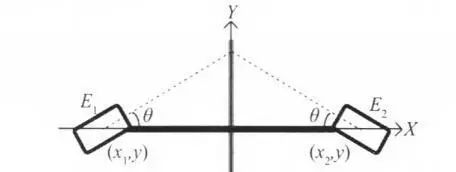
八字形和双T形电感排布方案介绍
工字电感分布认知 双水平电感排布方案
智能车控制器功能有哪些
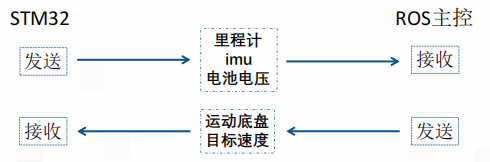
ROS与STM32串口通信代码

ROS主控如何创建设备别名
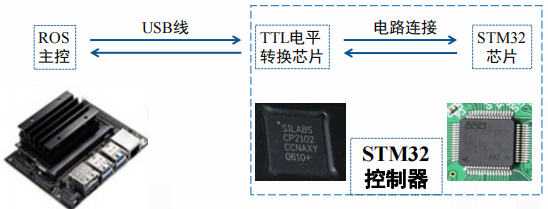
ROS主控与STM32的硬件连接和软件设置
智能车控制器功能介绍
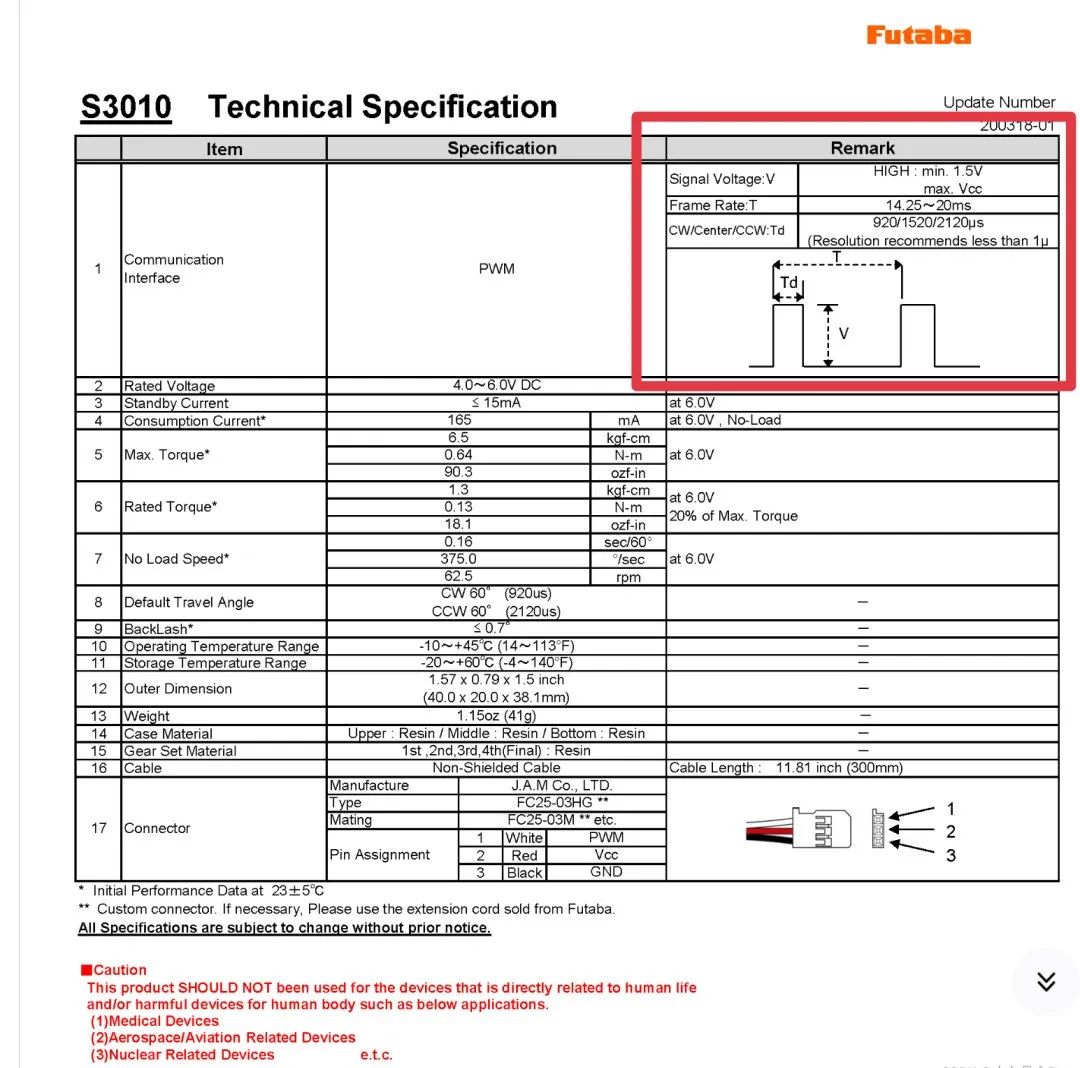
方向控制中舵机值及限幅
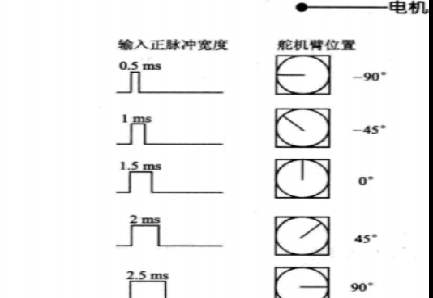
智能车方向控制舵机PWM技术
方向控制环节与控制量

智能车方向控制典型环节分析

 下载APP
下载APP
 搜索内容
搜索内容
