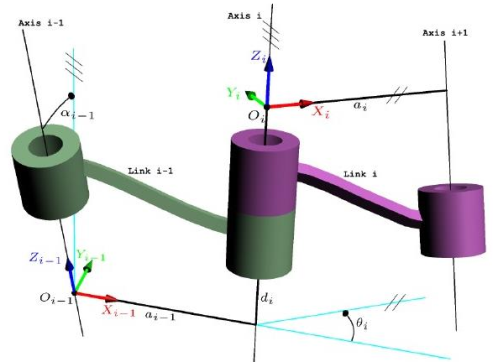
机器人模型其他关节的定义
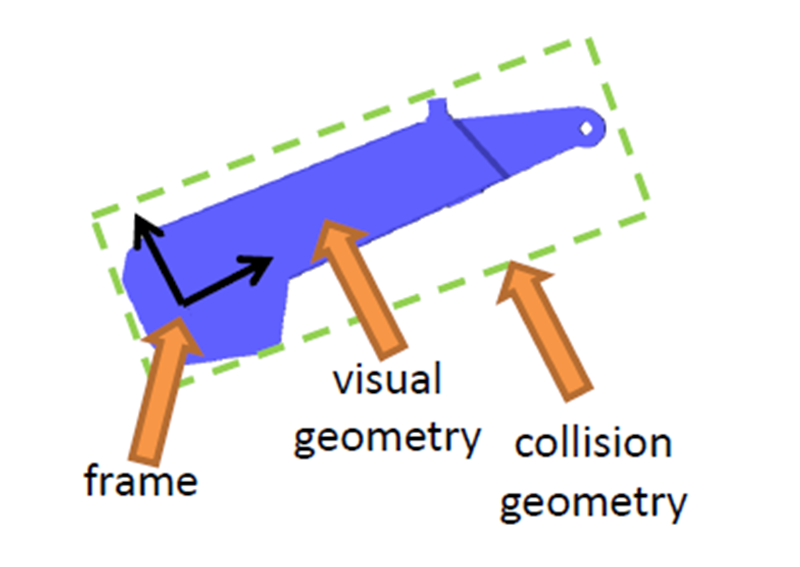
机械臂连杆Link的描述
如何解决柔性机械臂建模过程问题
刚性机械臂的动力学建模
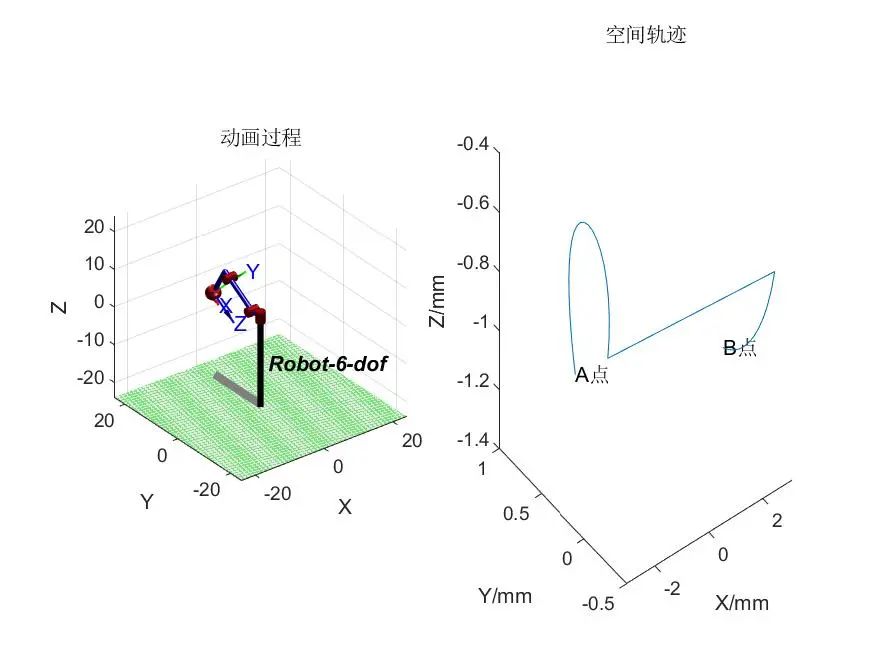
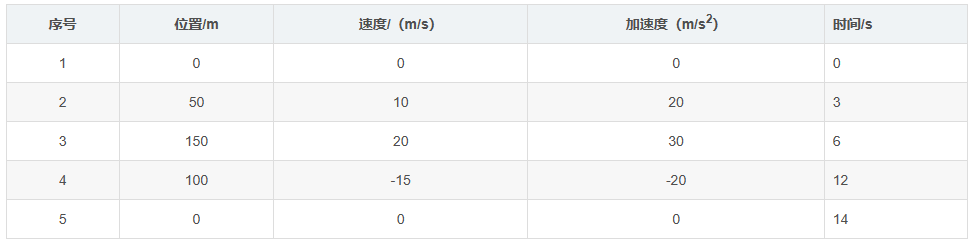
六自由度机械臂轨迹规划仿真
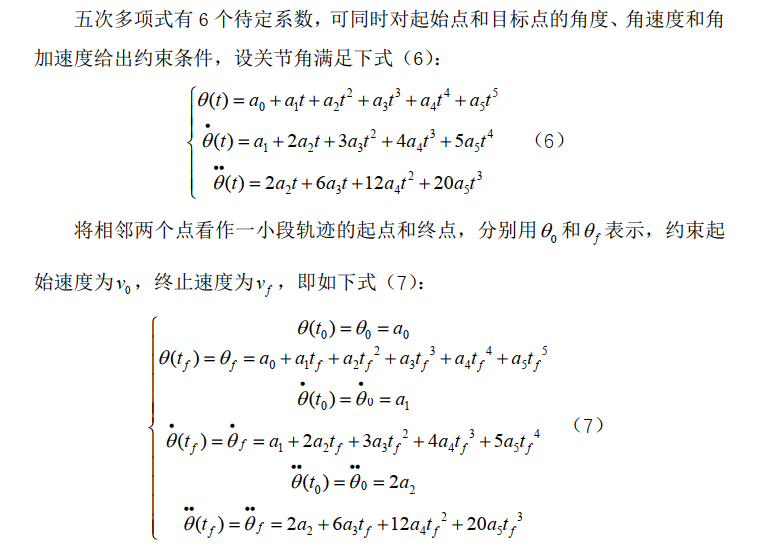
机械臂五次多项式插值法介绍
六自由度机械臂三次多项式插值法
机械臂结构是什么样的

什么是近源攻击?近源攻击的安全研究思路
什么是力控机器人 优点有哪些
单关节机械臂接触力补偿因素

RZ/A2M在工业自动化领域应用的优势
开源六轴协作机械臂MechArm 拖动示教模型案例
英飞凌与DH Robotics合作推出下一代电动夹持器
浅谈工业机器人中的电子控制器模块

工业机器人远程维护解决方案,体验线上秒修的畅快感
中微爱芯高性能2线串行EEPROM AiP24C128(替代罗姆BR24G02)用于医用机械臂
什么是相机标定?视觉机械臂自主抓取全流程

人工智能套装myCobot 320版视觉算法深度解析
工业机器人和机械臂在设计、功能和应用上有何区别?

 下载APP
下载APP
 搜索内容
搜索内容
