
STM32H5开发陀螺仪LSM6DSV16X(5)----上报匿名上位机
STM32H5开发陀螺仪LSM6DSV16X(4)----中断获取SFLP四元数

STM32H5开发陀螺仪LSM6DSV16X(2)----轮询获取磁力计数据
STM32H5开发陀螺仪LSM6DSV16X(1)----轮询获取陀螺仪数据

理解传感器零偏Sensor Bias (offset)
LSM6DSV16BX:集成机器学习核心与Qvar感应的先进惯性测量单元
LSM6DSV80X 6轴惯性测量单元技术解析

MEMS惯性器件主要技术指标

无人机如何靠陀螺仪保持稳定飞行?

如何让设备姿态测量更精准?这款超小MEMS陀螺仪来帮你!

为什么选择组合导航?它有哪些优势?
振动陀螺仪传感器的工作原理

陀螺仪在钻井或测井中有何用途?

MEMS陀螺仪在钻井中发挥什么作用?

MEMS陀螺仪的寻北原理是什么?精度如何?
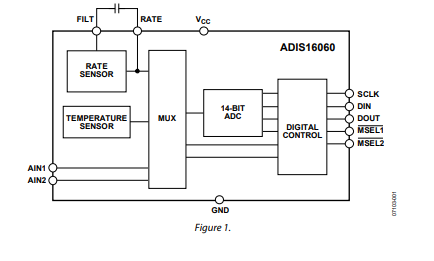
ADIS16060宽带宽偏航角速度陀螺仪,采用SPI接口技术手册
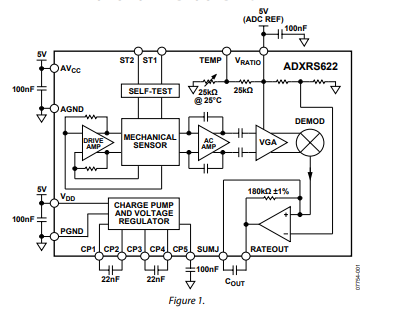
ADXRS622角速度陀螺仪技术手册
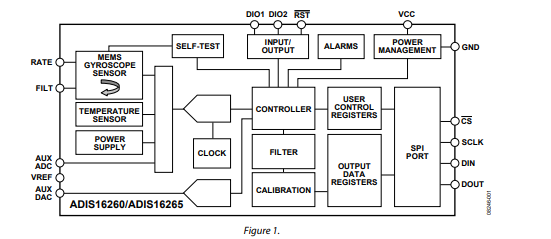
ADIS16260 ADIS16265可编程低功耗陀螺仪技术手册
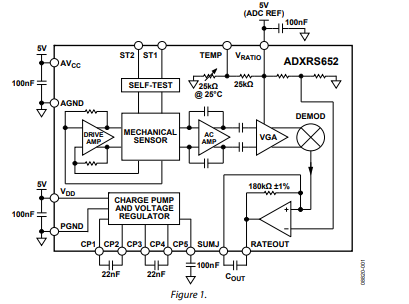
ADXRS652角速度陀螺仪技术手册
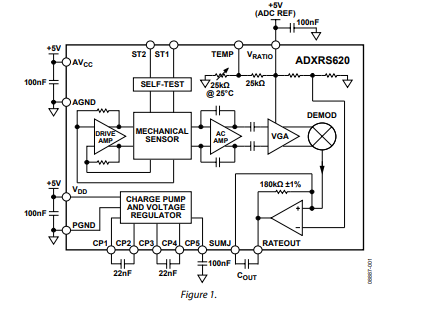
ADXRS620角速度陀螺仪技术手册

 下载APP
下载APP
 搜索内容
搜索内容
