KUKA系统变量:$IOSIM_OPT模拟的激活或停用

KUKA-C4点焊机器人的控制原理

KUKA机器人-结构化机器人程序V5.9
KUKA机器人CAST_TO-CAST_FROM简析
KUKA机器人如何建立组织块CYCLE

KUKA机器人KLI网络分析

KUKA机器人电伺服焊钳配置及力的建立过程V4.21
KUKA机器人SPSTRIGGER的用法
WorkVisual将机器人控制系统配给实际应用的机器人控制系统
KUKA机器人更换手轴A4-A5-A6A的几个关键点
KUKA给整数计数器或者二进制输出端赋值
KUKA机器人中阵列的概念解析
KUKA机器人smartPAD屏上空间鼠标的相关变量介绍
KUKA机器人大众PFO激光飞行焊头控制方法介绍
KUKA机器人高级编程CWRITE的用法
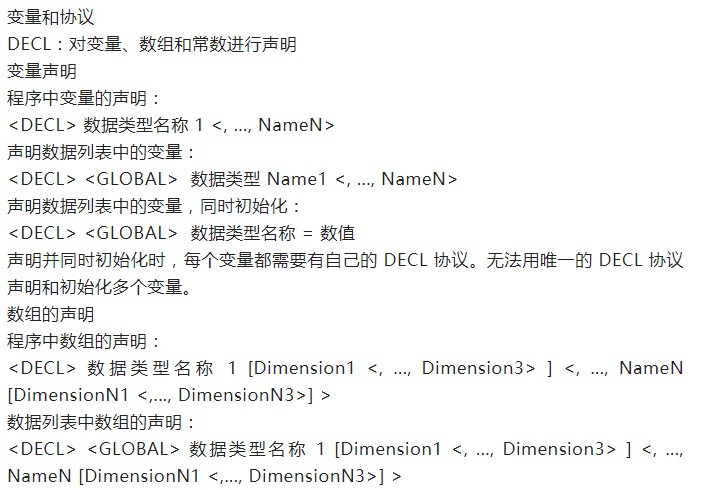
KUKA-DECL变量和协议介绍
KUKA机器人在暖机阶段监控电机电流
KUKA机器人外部自动控制配置步骤
KUKA机器人高级编程CWRITE的用法V3.1
KUKA机器人更换手轴A4-A5-A6A的几个关键点

 下载APP
下载APP
 搜索内容
搜索内容
