多层感知机与神经网络的区别

动态环境中基于神经隐式表示的RGB-D SLAM

4DGen:基于动态3D高斯的可控4D生成新工作
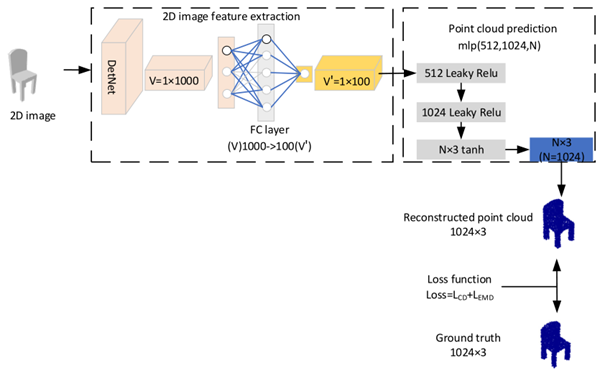
基于DetNet的单阶段单视图三维点云重建网络

探索Transformer Block精简的方式

PanopticNeRF-360:快速生成大量新视点全景分割图像!

一种基于RGB-D图像序列的协同隐式神经同步定位与建图(SLAM)系统

EmerNeRF:全面基于NeRF的自动驾驶仿真框架,无需分割

只要MLP就能实现的三维实例分割!
神经网络模型的工作原理、种类及优缺点

汽车领域拥抱Transformer需要多少AI算力?
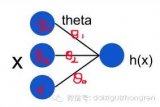
BP神经网络算法 BP算法之一种直观的解释

Focus-DETR:30%Token就能实现SOTA性能,效率倍增

基于AX650N部署SegFormer
基于AX650N部署SegFormer
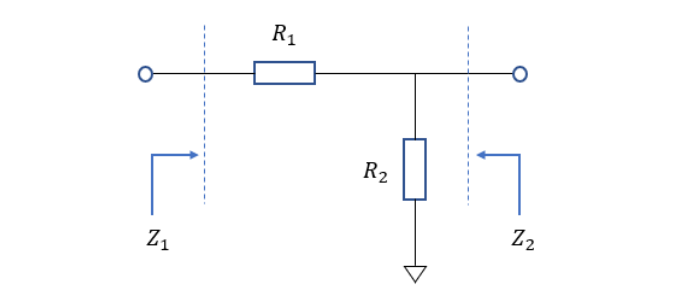
聊聊不一样的衰减器Matching PAD
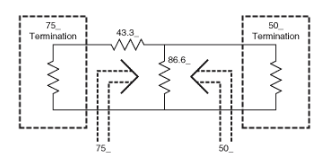
用于75Ω测量的CATV最小损耗衰减器
LLM底座模型:LLaMA、Palm、GLM、BLOOM、GPT结构对比

详解五种即插即用的视觉注意力模块

联合NeRF与特征网格,实现超大规模城市渲染

 下载APP
下载APP
 搜索内容
搜索内容
