
ROS系统的智能车开发-基于米尔芯驰MYD-JD9X开发板
ROS2 robot-localization配置方案

浪潮信息EIS400自动驾驶域控制器结构体系解读

移动机器人的运行架构

移动机器人的组成和操作方法
ros怎么设置环境变量

ROS机器人如何使用Navigation导航包实现实时定位
ogetherROS应用场景有哪些
如何验证ROS是否安装成功 ubuntu20.04教程
ubuntu20.04设置环境变量方法

在ubuntu20.04中如何初始化rosdep
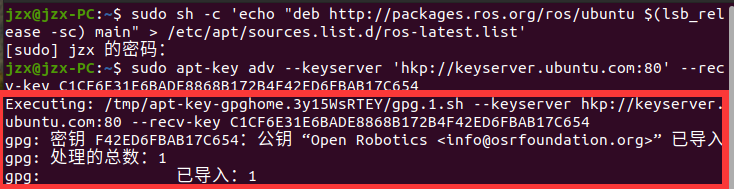
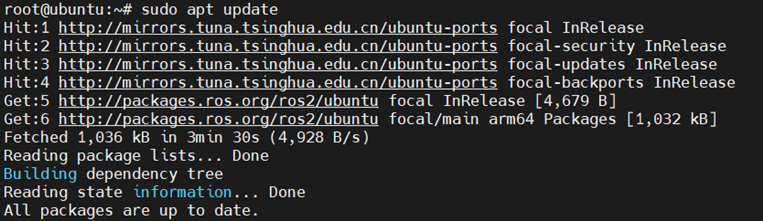
如何在ubuntu20.04中添加和更新ROS软件源

在TogetherROS中如何安装ROS2功能包
TogetherROS系统更新和CPU调频策略配置
TogetherROS系统中如何配置网络连接

话题通信接口的定义和运行效果

服务通信接口的定义与使用
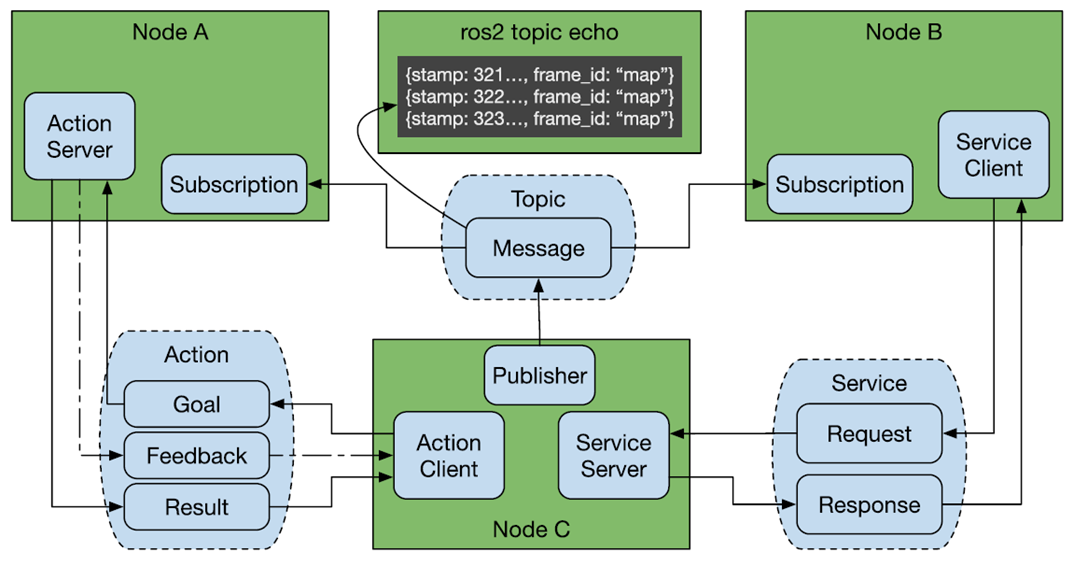
ROS通信接口机制介绍
接口的定义 通信接口的作用

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!

 下载APP
下载APP
 搜索内容
搜索内容
