奥比中光领跑中国服务机器人视觉感知赛道
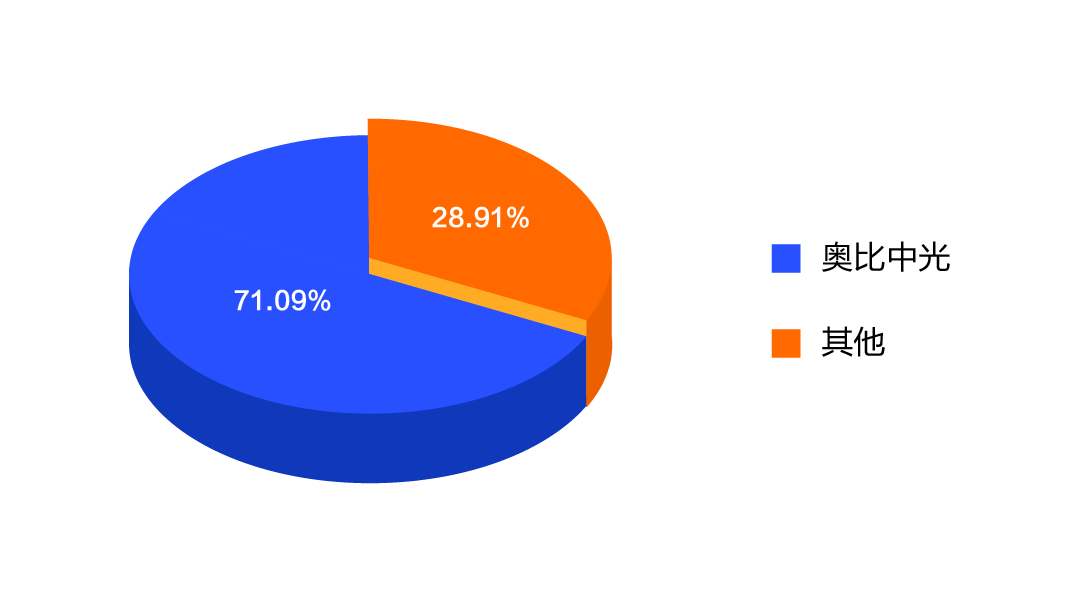
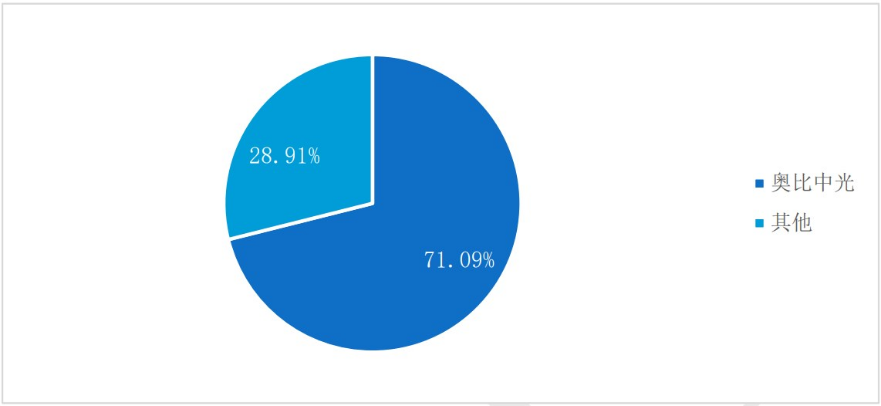
奥比中光市占率超过70% 领跑全球3D视觉感知市场

朱老师出新书了!!《ROS机器人编程零基础入门》
地平线旭日X3派试用 | ssh密钥登陆 蓝牙手柄连入ros

实现ARM+ROS(机器人操作系统)之环境搭建!
解决旭日X3派串口登陆时,控制窗口小的情况
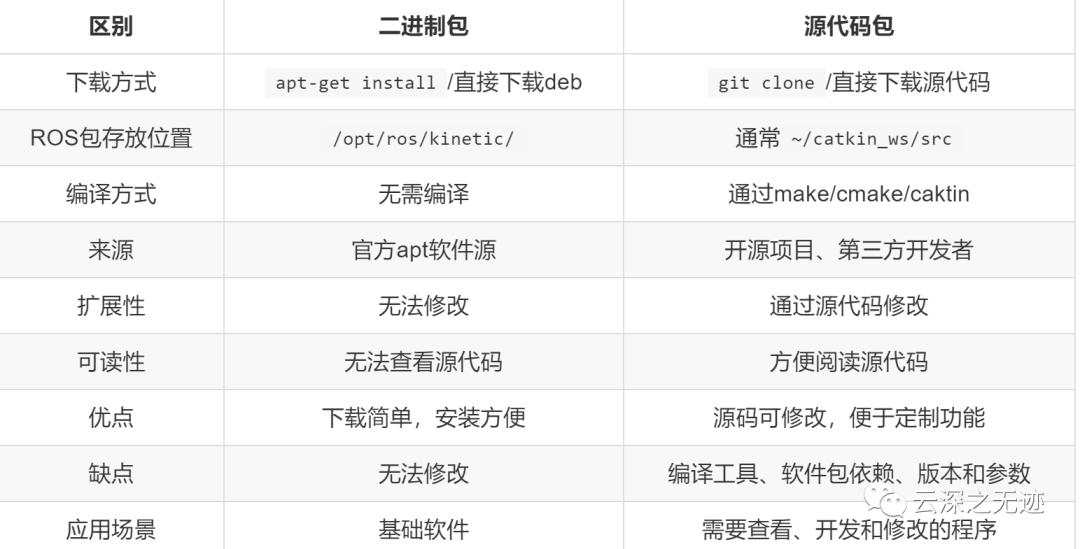
剖析ROS编译教程
使用NVIDIA Isaac ROS Developer Preview 3构建高性能机器人应用
ROS教程(Xavier)
ROS常用指令
ROS机器人操作系统底层原理及代码剖析
ROS2概述和实践入门
介绍一款仿真器v2e
在ROS下面的一个组件实现Octomap显示
介绍一种基于液滴微流控的线粒体转移技术
NVIDIA Isaac ROS GEM的功能特性
Isaac仿真平台搭建以及ROS试用教程

使用myPalletizer人工智能套件实现颜色和图像识别
全新ROS 2 Humble硬件加速特性
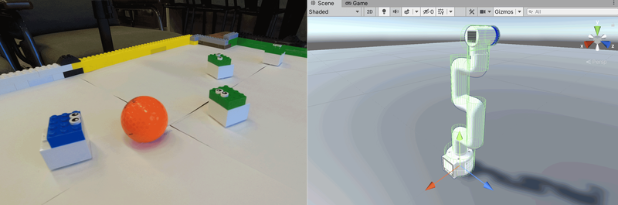
myCobot机械臂应用于Unity机器人编程实战课

 下载APP
下载APP
 搜索内容
搜索内容
