SLAM优化算法:图优化和凸优化算法的区别
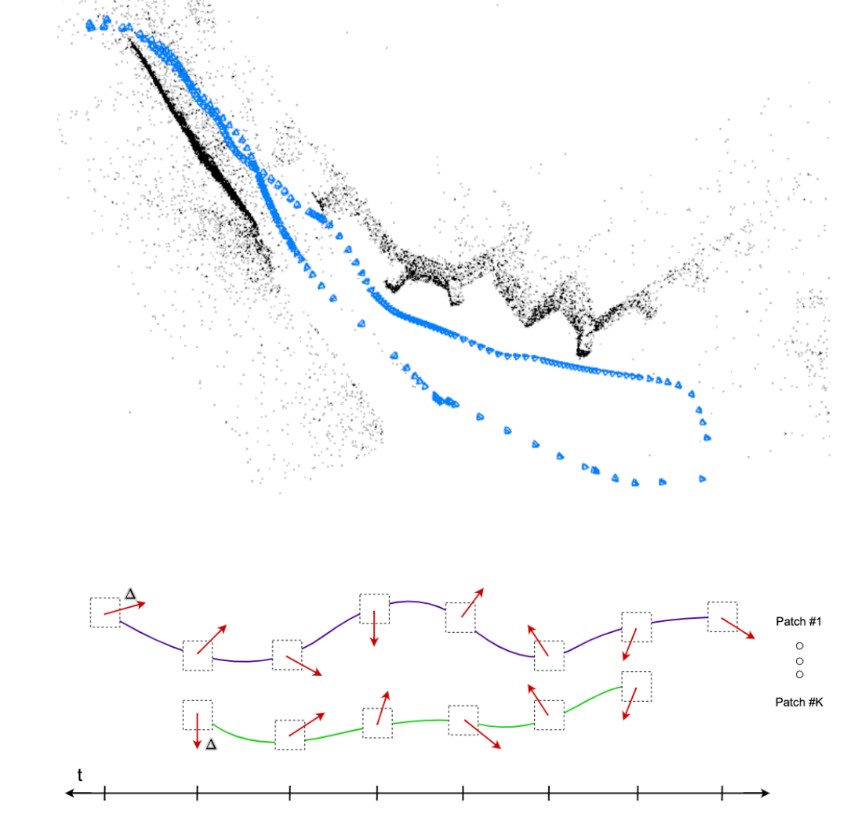
一种使用transformer架构的新型线段描述符
一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架
基于自动驾驶汽车记录的3D激光扫描的SLAM闭环问题讨论
一种新的单目视觉里程计深度学习系统
一个典型的SLAM框架
如何直接建立2D图像中的像素和3D点云中的点之间的对应关系
基于SupSLAM的视觉惯性SLAM方法
一种R3LIVE++的LiDAR惯性视觉融合框架
特征点提取器ORBextractor详解
一种动态环境下的直接视觉里程计
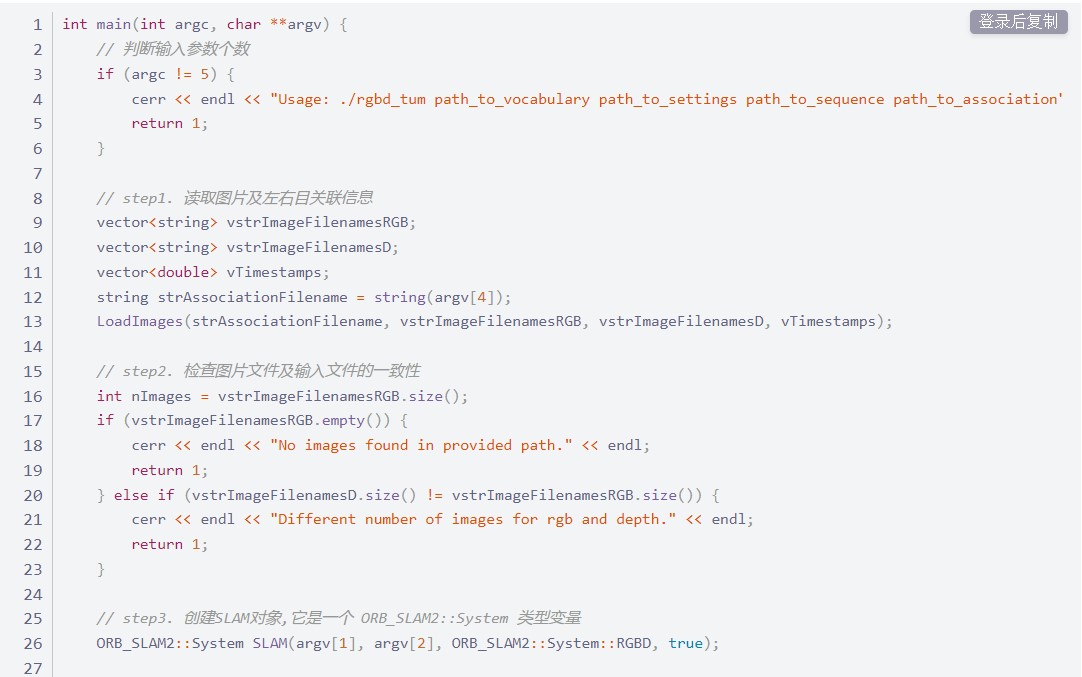
ORB-SLAM2的变量命名规则代码运行流程简析
机器人的SLAM和导航系统技术分析
针对视觉SLAM的VO稳定的图像配准算法解析
基于动态环境中的鲁棒BA和选择性全局优化的鲁棒VI-SLAM框架
基于图的SLAM点稀疏化方法
大神分享 X3派+大疆无人机-SLAM单目建图.ROS包制作
测试的SLAM方案
自动驾驶动态场景中的SLAM的应用分析

OpenCV新增描述子BEBLID

 下载APP
下载APP
 搜索内容
搜索内容
