



全面总结动态NeRF
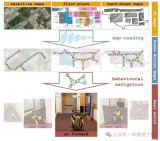
机器人没有度量信息如何导航

最新图优化框架,全面提升SLAM定位精度

如何设定机器人语义地图的细粒度级别

MG-SLAM:融合结构化线特征优化高斯SLAM算法

为何无人机领域广泛采用PX4作为核心控制平台

一种提升无人机小物体跟踪精度的方法
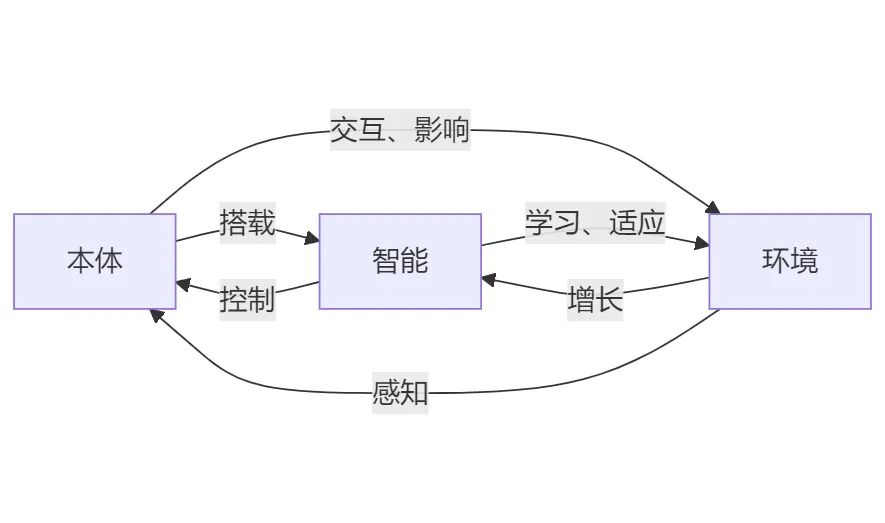
什么是具身智能?它有什么用?

基于旋转平移解耦框架的视觉惯性初始化方法

基于深度学习的三维点云分类方法

一种全新开源SfM框架MASt3R

Pytorch深度学习训练的方法

使用STT全面提升自动驾驶中的多目标跟踪

一种将NeRFs应用于视觉定位任务的新方法

使用语义线索增强局部特征匹配

扩散模型的理论基础

常用的RGB-D SLAM解决方案
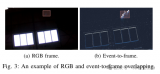
小于50ms!IEEE'24最新,高效低延迟UVA检测系统!

CVPR'24 Highlight!跟踪3D空间中的一切!
什么是SLAM?基于3D高斯辐射场的SLAM优势分析