
资料下载


×
机器人如何从各轴角度算出当前XYZ详细资料说明
消耗积分:10 |
格式:docx |
大小:0.33 MB |
2020-03-23
心想事成1111111
分享资料个
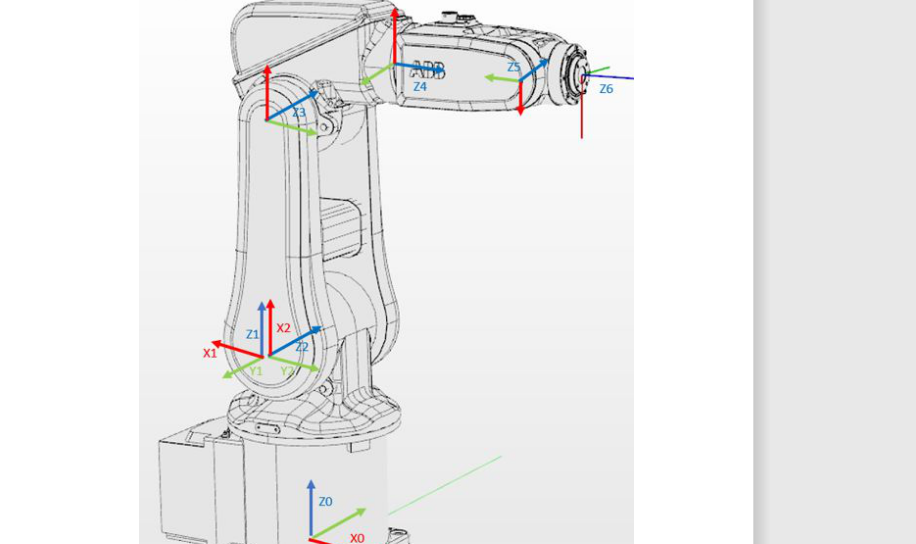
本文档的主要内容详细介绍的是机器人如何从各轴角度算出当前XYZ详细资料说明。
1. 机器人只是知道各个轴的角度,机器人是如何知道当前法兰盘的XYZ笛卡尔系坐标呢?
2. 问题一其实就是机器人运动学正解问题,即通过a1-a6角度值,计算对应的末端工具(此处举例法兰盘)坐标值(XYZ ABC)
3. 对于空间一个位姿(位置XYZ,姿态ABC)可以通过位姿矩阵表示,
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






