
资料下载


×
CAN总线原理的发展历程详细说明
消耗积分:2 |
格式:pdf |
大小:0.95 MB |
2020-11-26
分享资料个
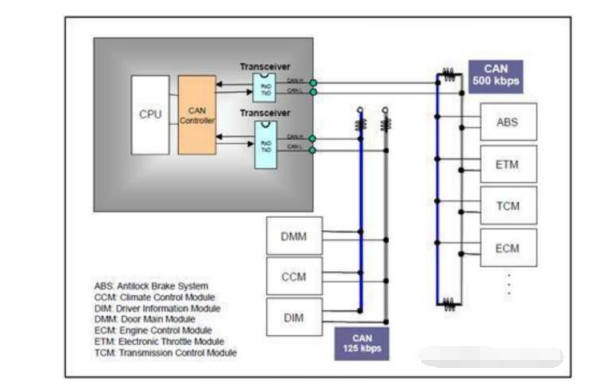
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。最初,CAN 被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置 ECU 之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入 CAN 控制装置。
一个由 CAN 总线构成的单一网络中,理论上可以挂接无数个节点。实际应用中,节点数目受网络硬件的电气特性所限制。 CAN 可提供高达 1Mbit/s 的数据传输速率,这使实时控制变得非常容易。另外,硬件的错误检定特性也增强了 CAN 的抗电磁干扰能力。
CAN 总线技术原理
CAN 总线使用串行数据传输方式,可以 1Mb/s 的速率在 40m 的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。CAN 与 I2C 总线的许多细节很类似,但也有一些明显的区别。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



