
资料下载


5合1 Arduino机器人开源项目
分享资料个
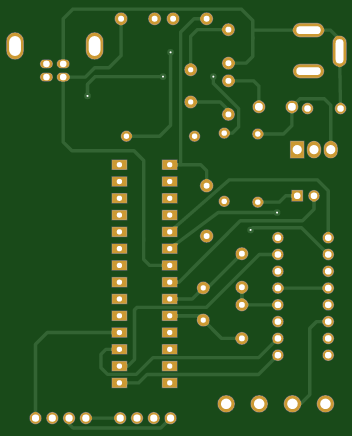
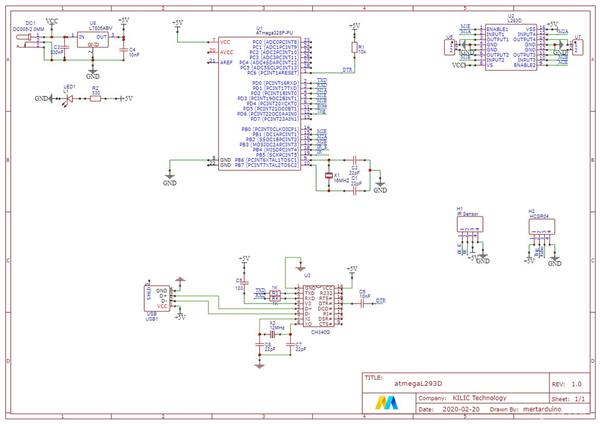
PCB图如下: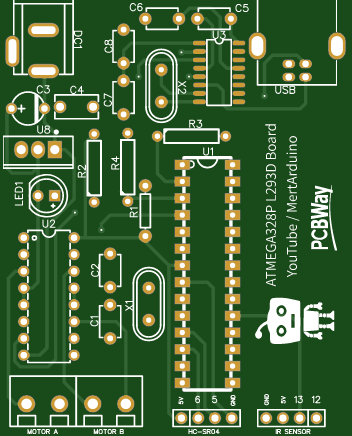
描述
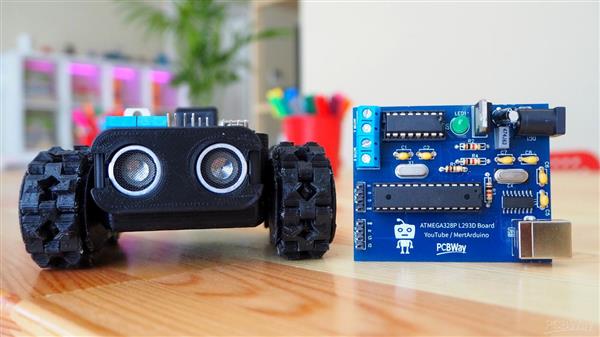
5 合 1 Arduino 机器人 | 跟我来 | 线路跟踪 | 相扑 | 绘图 | 避障
该机器人控制板包含一个 ATmega328P 微控制器和一个 L293D 电机驱动器。当然,它与 Arduino Uno 板没有什么不同,但它更有用,因为它不需要另一个屏蔽来驱动电机!它没有跳线杂乱,可以使用 CH340G 轻松编程。在驱动两个直流电机的同时,您还可以通过使用此板的 I/O 引脚来控制不同的传感器。在这个项目中,我们使用了 HC-SR04 超声波距离传感器和 IR 红外传感器。此外,使用了一台伺服电机。您还可以通过此视频了解如何制作自己的 arduino uno 板。
您可以使用此控制板对具有 5 种不同场景的机器人进行编程。本项目包含以下场景:
SUMO 模式:这是一项运动,其中两个机器人试图将彼此推出一个圆圈(以类似于相扑运动的方式)。
跟随模式:它可以使用HC-SR04传感器感知被跟随物体的存在。
跟踪模式:线跟随机器人是一种跟随一条线的车辆,无论是黑线还是白线。
避障模式:避障机器人是一种智能设备,可以自动感知前方障碍物,并通过转向另一个方向来避开它们。
绘图模式:它包含伺服电机和一支笔。它可以在表面上绘制自己的运动轨迹。
在这个项目中,为了便于焊接,使用了 DIP 型元件。
代码
https://github.com/MertArduino/RobotControlBoard
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




